Wie man Magnetschwebebahn mit eigenen Händen macht. Magnetschwebetechnik - was es ist und wie es möglich ist. Selbstgemachtes Levitron im klassischen Design ohne Sensor
.
In diesem Artikel zeigt uns Konstantin, How-Todo-Workshop, wie man ein Levitron herstellt.
Also Levitron. Das Funktionsprinzip dieses Pribluda ist einfach wie eine selbstschneidende Schraube. Mit einem Elektromagneten heben wir ein Stück magnetisches Material in die Luft. Um einen schwebenden Effekt zu erzeugen, schalten Sie den Elektromagneten mit hoher Frequenz ein und aus.
Das heißt, wir heben und werfen sozusagen eine magnetische Probe.
Das Schema eines solchen Geräts ist überraschend einfach und kann nicht schwer wiederholt werden. Hier ist tatsächlich das Diagramm.

Die Materialien und Komponenten, die wir brauchen.

LED jeder Farbe, es ist optional.
Ein IRFZ44N-Transistor, fast jeder Feldcontroller mit ähnlichen Parametern, reicht aus.
Diode, hier verwendet der Autor HER207, einige 1N4007 werden mit dem gleichen Erfolg funktionieren.
Widerstände für 1 kOhm und 330 Ohm (letzteres ist optional).
Hallsensor, ich habe ihn A3144, er kann auch durch einen ähnlichen ersetzt werden.
Kupferwickellackdraht mit einem Durchmesser von 0,3 bis 0,4 mm, 20 Meter Der Autor hat einen Draht von 0,36 mm.

Ein Neodym-Magnet wie eine Tablette, 5 x 1 mm, ist im Rahmen des Zumutbaren ebenfalls nicht besonders wichtig.

Als Stromquelle eignet sich ein unnötiges Fünf-Volt-Telefonladegerät.

Kleber, Papier, Lötkolben, Lötzinn ... Standard-Lötkolben-Set.
Kommen wir zur Montage. Zuerst müssen Sie eine Pappspule für den Körper des zukünftigen Elektromagneten herstellen.
Die Spulenparameter sind wie folgt:
6 mm Durchmesser der Innenhülse, die Breite der Wickellage beträgt ca. 23 mm und der Durchmesser der Backen, mit einem Spielraum von ca. 25 mm.

Wie Sie sehen, hat Konstantin eine Hülle für eine Kartonrolle und einen Schnitt eines Notizbuchblatts gebaut und sie gründlich mit Sekundenkleber geschmiert.
Lassen Sie uns den Anfang des Drahtes im Rahmen befestigen, haben Sie Geduld und beginnen Sie mit dem Wickeln von etwa 550 Umdrehungen.

Die Wickelrichtung ist irrelevant. Sie können es sogar in großen Mengen aufwickeln, aber das ist nicht unsere Methode.

Wir wickeln 12 Lagen nacheinander auf und isolieren jede Lage mit Isolierband.

Nach anderthalb Stunden befestigen wir das Ende des Drahtes und legen die Spule beiseite.

Wir löten weiter, alles ist nach dem Schema, ohne Unterschiede.




Die Schlussfolgerungen des Hallsensors werden mit Drähten verlängert und mit Schrumpfschlauch isoliert, da er innerhalb der Spule platziert werden muss.


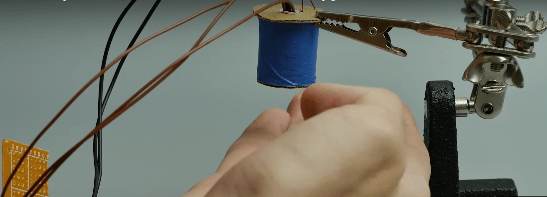
Eigentlich alles, es bleibt nur noch zu konfigurieren, dafür bauen wir den Hallsensor in die Spule ein und fixieren ihn mit improvisierten Mitteln.

Wir hängen die Spule auf, schalten den Strom ein.

Nachdem wir den Magneten angehoben haben, spüren wir, dass er je nach Polarität angezogen oder abgestoßen wird.
In einiger Entfernung versucht der Magnet zu hängen, hängt aber lange nicht.

Wir studieren die Dokumentation zum Sensor, wo speziell in Bildern gezeigt wird, auf welcher Seite er eine sensible Zone hat.

Wir nehmen es heraus und biegen es so, dass die flache Seite mit den Inschriften parallel zum Boden ist.

Wir schieben es zurück, diesmal ist alles viel besser.

Aber es schwimmt immer noch nicht.

Das Problem liegt in der Form des Magneten, nämlich der flachen "Tabletten"-Form.
Nicht das Beste, was man sich für Levitation vorstellen kann. Es genügt, den Schwerpunkt nach unten zu verlagern. Wir werden dies mit einem dicken Blatt Papier organisieren.

Übrigens, vor dem Aufkleben des Gegengewichts nicht vergessen, zuerst zu schauen, auf welcher Seite der Magnet von der Spule angezogen wird.

Jetzt funktioniert alles mehr oder weniger von selbst, es bleibt nur noch das Zentrieren und Fixieren des Sensors.
Levitron ist, wie Sie wissen, ein Kreisel, der sich in der Luft über einem Kasten dreht, in dem eine Magnetfeldquelle wirkt. Levitron kann aus dem beliebten Hallsensor hergestellt werden.
Was ist Levitron?
BEACHTUNG! Eine ganz einfache Möglichkeit gefunden, den Kraftstoffverbrauch zu senken! Glauben Sie mir nicht? Auch ein Automechaniker mit 15 Jahren Erfahrung glaubte nicht, bis er es versuchte. Und jetzt spart er 35.000 Rubel pro Jahr beim Benzin!
Levitron ist ein Spielzeug. Es macht keinen Sinn, es zu kaufen, wenn Sie die Möglichkeiten kennen, ein hausgemachtes Gerät herzustellen. Die Konstruktion eines solchen Levitrons wird nicht kompliziert sein, wenn ein herkömmlicher Hallsensor beispielsweise für einen Automobilhändler gekauft und für die zukünftige Verwendung übrig bleibt.
Sie sollten sich bewusst sein, dass der Levitationseffekt immer in einer ziemlich engen Zone beobachtet wird. Solche Realitäten schränken die Handlungsfreiheit der Handwerker etwas ein, mit Geduld und Zeit können Sie den Levitron jedoch immer effizient und effizient konfigurieren. Er wird praktisch nicht fallen oder springen.
Hallsensor Levitron
Levitron für einen Hallsensor und die Idee, es einfach zu machen, ist wie alles genial. Aufgrund der Stärke des Magnetfeldes steigt ein Stück eines beliebigen Materials mit elektromagnetischen Eigenschaften in die Luft.

Um den Effekt des "Schwebens" zu erzeugen, wird die Verbindung mit einer hohen Frequenz durchgeführt. Mit anderen Worten, das Magnetfeld hebt und schleudert das Material sozusagen.
Das Schema des Geräts ist zu einfach, und selbst ein Schüler, der nicht umsonst den Physikunterricht durchgesessen hat, kann alles selbst bauen.
- Wir brauchen eine LED (deren Farbe wird je nach individuellen Vorlieben ausgewählt).
- RFZ 44N-Transistoren (obwohl jedes Feldgerät in der Nähe dieser Parameter ausreicht).
- Diode 1N 4007.
- 1k Ohm und 330 Ohm Widerstände.
- Eigentlich der Hallsensor selbst (A3144 oder andere).
- Kupferwicklungsdraht mit einer Größe von 0,3-0,4 mm (ca. 20 Meter reichen aus).
- Neodym-Magnet in Form einer 5x1 mm Tablette.
- 5-Volt-Ladegerät für Mobiltelefone.
Nun im Detail, wie die Montage durchgeführt wird:
- Ein Rahmen für den Elektromagneten wird mit genau den gleichen Parametern wie auf dem Foto hergestellt. 6 mm - Durchmesser, ca. 23 mm - Wickellänge, 25 mm - Backendurchmesser mit Rand. Ein Rahmen wird aus Karton und einem normalen Notizbuchblatt mit Sekundenkleber hergestellt.

- Das Ende des Kupferdrahtes wird an der Spule befestigt und dann gewickelt (ca. 550 Windungen). Es spielt keine Rolle, in welche Richtung der Wind weht. Das andere Ende des Drahtes wird ebenfalls gesichert, während die Spule beiseite gelegt wird.
- Wir löten alles nach dem Schema.

- Der Hallsensor wird auf die Verkabelung gelötet und dann auf die Spule gesteckt. Es ist notwendig, es in die Spule einzuführen und mit improvisierten Mitteln zu befestigen.
Beachtung. Der sensible Bereich des Sensors (diesen können Sie der Dokumentation zum Hallsensor entnehmen) muss parallel zum Boden liegen. Daher wird empfohlen, diese Stelle vor dem Einsetzen des Sensors in die Spule etwas zu biegen.

- Die Spule wird aufgehängt, sie wird über die zuvor gelötete Platine mit Strom versorgt. Die Spule wird mit einem Stativ befestigt.
Jetzt können Sie überprüfen, wie das Levitron funktioniert. Jedes elektrifizierte Material kann von unten an die Spule herangeführt werden. Je nach Polarität wird es von der Spule angezogen oder abgestoßen. Aber wir brauchen das Material, um in der Luft zu hängen, zu schweben. Dies ist der Fall, wenn die Form des Materials im Verhältnis zur Spule nicht zu klein ist.
Notiz. Wenn der Tablettenmagnet klein ist, wird er nicht sehr effektiv schweben. Es kann fallen. Um Fehler in der Arbeit zu beseitigen, ist es notwendig, den Schwerpunkt des Materials nach unten zu verlagern - als Last eignet sich ein gewöhnliches Blatt Papier.
Was die LED betrifft, müssen Sie sie nicht installieren. Auf der anderen Seite, wenn Sie mehr Wirkung wünschen, können Sie eine Show mit Hintergrundbeleuchtung organisieren.
Selbstgemachtes Levitron im klassischen Design ohne Sensor
Wie Sie sehen, war es dank des Hallsensors möglich, ein ziemlich spektakuläres Spielzeug herzustellen. Dies bedeutet jedoch keineswegs, dass Sie auf einen Sensor nicht verzichten können. Im Gegenteil, ein selbstgebauter Levitron im klassischen Design, es ist nur ein großer Magnet vom Lautsprecher (13-15 cm Durchmesser) und ein kleiner Ringmagnet für ein Top (2-3 cm Durchmesser), ohne zu verwenden ein Sensor.
Die Achse der Oberseite wird normalerweise aus einem alten Stift oder Bleistift hergestellt. Hauptsache, der Stab ist so gewählt, dass er genau in der Mitte des Ringmagneten sitzt. Der überstehende Teil des Griffs wird dann abgeschnitten (ca. 10 cm Länge, zusammen mit dem angebrachten Magneten für die Oberseite, das braucht man).
Das klassische Levitron-Fertigungsschema impliziert auch das Vorhandensein von einem Dutzend verschiedener Unterlegscheiben, die aus dickem Papier geschnitten wurden. Wozu werden sie benötigt? Wenn im obigen Fall auch Papier verwendet wurde, und wie wir uns erinnern - um den Schwerpunkt nach unten zu verschieben oder einfacher zur Anpassung. Hier ist es genauso. Die Unterlegscheiben werden für die optimale Einstellung des Oberteils benötigt (bei Bedarf werden sie nach dem Ringmagneten auf der Stange gepflanzt).

Beachtung. Damit ein selbstgebautes Oberteil perfekt schwebt, darf man sich neben der Anpassung mit Unterlegscheiben nicht mit der Polarität verwechseln. Richten Sie also den Ringmagneten auf den großen Magneten aus.

Aber das ist nicht alles. Sowohl im ersten Fall (mit einem Hallsensor) als auch im zweiten Fall ist es erforderlich, die ideale Gleichmäßigkeit der Anziehungsquelle zu erreichen. Mit anderen Worten, platzieren Sie einen großen Magneten auf einer perfekt ebenen Fläche. Um dies zu erreichen, werden Holzuntersetzer unterschiedlicher Dicke verwendet. Sitzt der Magnet nicht gleichmäßig, werden die Ständer ein- oder mehrseitig platziert, dadurch wird die Ebenheit angepasst.
Plattform Levitrons
Das Plattformschema des Levitron zeichnet sich in der Regel durch das Vorhandensein nicht eines, sondern mehrerer Quellmagnete aus. In diesem Fall neigt ein in der Luft schwebendes Material oder eine Oberseite dazu, auf einen der Magnete zu fallen, die von der vertikalen Achse verschoben sind. Um dies zu vermeiden, müssen Sie in der Lage sein, die zentrale Schwerkraftzone einzustellen und dies perfekt genau zu tun.
Und hier kommen die gleichen Spulen zur Rettung, mit einem eingebauten Hallsensor. Lassen Sie es zwei solcher Spulen geben, und sie sollten genau in der Mitte der Plattform zwischen den Magneten platziert werden. Auf dem Diagramm sieht es so aus (1 und 2 sind Magnete).

Aus dem Diagramm wird deutlich, dass der Zweck der Steuerung der Spulen darin besteht, eine horizontale Kraft, einen Schwerpunkt, zu erzeugen. Diese Kraft wird formal als Fss bezeichnet und ist bei einer Verschiebung auf die Gleichgewichtsachse gerichtet, die im Diagramm als X angezeigt wird.
Wenn Sie die Spulen so anschließen, dass der Impuls eine Zone mit umgekehrter Polarität erzeugt, kann das Problem mit der Vorspannung gelöst werden. Das wird jeder Physiker bestätigen.
Als Gehäuse für den Bau der Plattform Levitron wird jeder alte DVD-Player gewählt. Alle „Inneren“ werden daraus entfernt, Magnete und Spulen verbaut, und der Schönheit halber wird das Oberteil mit einer praktischen Abdeckung aus dünnem, ggf. transparentem Material (das ein Magnetfeld durchlässt) verschlossen.
Hallsensoren sollten durch die Öffnungen der Plattform ragen, sollten an den ungebogenen Steckerbeinen angelötet werden.
Bei den Magneten kann es sich um runde Elemente mit einer Dicke von 4 mm handeln. Es ist wünschenswert, dass einer der Magneten einen größeren Durchmesser hat als der zweite. Zum Beispiel 25 und 30 mm.
Es gibt auch komplexere Versionen von Levitrons, die nach dem Schema des Abwickelns eines Kreisels in einer kleinen Kugel hergestellt werden. Diese Levitrons können auch mit Hall-Sensoren gebaut werden – effektive Komponenten, die die Automobilindustrie und andere Bereiche des menschlichen Handelns revolutioniert haben.
Wie Sie wissen, hat die Erde aufgrund der bestehenden Weltordnung einen bestimmten menschlichen Traum und war es immer, diesen mit allen Mitteln zu überwinden. Magnetschwebetechnik ist eher ein phantastischer Begriff als eine alltägliche Realität.
Ursprünglich bedeutete es eine hypothetische Fähigkeit, die Schwerkraft auf unbekannte Weise zu überwinden und Personen oder Gegenstände ohne Hilfsmittel durch die Luft zu bewegen. Aber jetzt ist das Konzept der "Magnetschwebebahn" schon ziemlich wissenschaftlich.
Basierend auf diesem Phänomen werden mehrere innovative Ideen gleichzeitig entwickelt. Und alle versprechen langfristig hervorragende Möglichkeiten für den vielseitigen Einsatz. Die Magnetschwebebahn wird zwar nicht mit magischen Methoden durchgeführt, sondern mit ganz bestimmten Errungenschaften der Physik, nämlich der Abteilung, die Magnetfelder und alles, was damit zusammenhängt, untersucht.
Ein bisschen Theorie
Unter Menschen, die weit von der Wissenschaft entfernt sind, gibt es die Meinung, dass die Magnetschwebebahn ein geführter Flug eines Magneten ist. Tatsächlich bedeutet dieser Begriff, dass ein Objekt die Schwerkraft mithilfe eines Magnetfelds überwindet. Eine seiner Eigenschaften ist der magnetische Druck, mit dem die Schwerkraft der Erde "bekämpft" wird.
Einfach ausgedrückt, wenn die Schwerkraft einen Gegenstand nach unten zieht, wird der magnetische Druck so gerichtet, dass er ihn in die entgegengesetzte Richtung abstößt - nach oben. So schwebt der Magnet. Die Schwierigkeit bei der Umsetzung der Theorie besteht darin, dass das statische Feld instabil ist und sich nicht auf einen bestimmten Punkt konzentriert, sodass es der Anziehung möglicherweise nicht effektiv widerstehen kann. Daher sind Hilfselemente erforderlich, die dem Magnetfeld dynamische Stabilität verleihen, so dass das Schweben des Magneten ein regelmäßiges Phänomen ist. Als Stabilisatoren werden dafür verschiedene Techniken verwendet. Am häufigsten - elektrischer Strom durch Supraleiter, aber es gibt auch andere Entwicklungen in diesem Bereich.

Technisches Schweben
Tatsächlich bezieht sich die magnetische Variante auf den breiteren Begriff für die Überwindung der Gravitationsanziehung. Also, technisches Schweben: ein Überblick über die Methoden (sehr kurz).
Mit der Magnettechnik scheinen wir ein wenig herausgefunden zu haben, aber es gibt auch eine elektrische Methode. Im Gegensatz zum ersten können mit dem zweiten Produkte aus verschiedenen Materialien (im ersten Fall nur magnetisierten), sogar Dielektrika, manipuliert werden. Elektrostatische und elektrodynamische Levitation wird ebenfalls unterteilt.
Die Fähigkeit von Teilchen, sich unter Lichteinfluss zu bewegen, wurde von Kepler vorhergesehen. Und die Existenz wurde von Lebedew bewiesen. Die Bewegung eines Teilchens in Richtung der Lichtquelle (optische Levitation) wird als positive Photophorese bezeichnet, in die entgegengesetzte Richtung als negativ.

Die aerodynamische Levitation, die sich von der optischen Levitation unterscheidet, ist in den heutigen Technologien recht weit verbreitet. Das "Kissen" ist übrigens eine seiner Sorten. Das einfachste Luftkissen ist ganz einfach - viele Löcher werden in das Trägersubstrat gebohrt und mit Druckluft durchgeblasen. In diesem Fall gleicht der Luftauftrieb die Masse des Objekts aus und es schwebt in der Luft.
Die letzte der Wissenschaft bekannte Methode ist die Levitation mit akustischen Wellen.

Welche Beispiele für Magnetschwebetechnik gibt es?
Wissenschaftler träumten von tragbaren Geräten in der Größe eines Rucksacks, die eine Person mit erheblicher Geschwindigkeit in die gewünschte Richtung "levitieren" könnten. Die Wissenschaft ist bisher einen anderen Weg gegangen, praktischer und machbarer - es wurde ein Zug geschaffen, der sich mit Hilfe der Magnetschwebebahn bewegt.
Supertrain-Geschichte
Zum ersten Mal wurde die Idee einer Komposition mit einem Linearmotor vom deutschen Ingenieur-Erfinder Alfred Zein eingereicht (und sogar patentiert). Und das war 1902. Danach erfolgte die Entwicklung einer elektromagnetischen Federung und eines damit ausgestatteten Zuges mit beneidenswerter Regelmäßigkeit: 1906 schlug Franklin Scott Smith zwischen 1937 und 1941 einen weiteren Prototyp vor. eine Reihe von Patenten zum gleichen Thema erhielt Herman Kemper, und wenig später schuf der Brite Eric Leisewait einen lebensgroßen Prototyp des Motors. In den 60er Jahren beteiligte er sich auch an der Entwicklung von Tracked Hovercraft, das eigentlich das meiste werden sollte, tat es aber nicht, da das Projekt 1973 wegen unzureichender Finanzierung eingestellt wurde.
Nur sechs Jahre später wurde wieder in Deutschland eine Magnetschwebebahn gebaut und zur Personenbeförderung zugelassen. Die in Hamburg verlegte Teststrecke war weniger als einen Kilometer lang, aber die Idee selbst inspirierte die Gesellschaft so sehr, dass der Zug auch nach Ausstellungsschluss funktionierte und in drei Monaten 50.000 Menschen transportierte. Seine Geschwindigkeit war nach modernen Maßstäben nicht so toll - nur 75 km / h.
Keine Ausstellung, sondern eine kommerzielle Magnetschwebebahn (wie sie den Zug mit Magneten nannte), verkehrte seit 1984 zwischen dem Flughafen Birmingham und dem Bahnhof und hielt ihre Stellung 11 Jahre lang. Die Gleislänge war noch kürzer, nur 600 m, und der Zug ragte 1,5 cm über das Gleis.

japanische Version
In Zukunft ließ die Aufregung um Magnetschwebebahnen in Europa nach. Aber Ende der 90er Jahre interessierte sich ein solches Hightech-Land wie Japan aktiv für sie. Auf seinem Territorium wurden bereits mehrere ziemlich lange Strecken verlegt, auf denen Magnetschwebebahnen fliegen, wobei ein Phänomen wie Magnetschwebetechnik verwendet wird. Das gleiche Land besitzt auch die Geschwindigkeitsrekorde dieser Züge. Der letzte von ihnen zeigte ein Tempolimit von mehr als 550 km/h.
Weitere Nutzungsaussichten
Einerseits überzeugen Magnetschwebebahnen durch ihre Schnellfahreigenschaften: Nach den Berechnungen der Theoretiker sollen sie in naher Zukunft mit bis zu 1.000 Stundenkilometern gefahren werden können. Immerhin werden sie durch Magnetschwebetechnik angetrieben und nur der Luftwiderstand verlangsamt sich. Daher wird der Effekt stark reduziert, wenn der Komposition so viele aerodynamische Konturen wie möglich gegeben werden. Darüber hinaus ist der Verschleiß solcher Züge aufgrund der Tatsache, dass sie die Schienen nicht berühren, äußerst langsam, was wirtschaftlich sehr rentabel ist.
Ein weiteres Plus ist der reduzierte Geräuscheffekt: Magnetschwebebahnen bewegen sich im Vergleich zu herkömmlichen Zügen nahezu geräuschlos. Ein Bonus ist auch der Einsatz von Strom in ihnen, der es ermöglicht, die schädlichen Auswirkungen auf Natur und Atmosphäre zu reduzieren. Außerdem überwindet es steilere Hänge, wodurch das Verlegen einer Bahntrasse über Hügel und Hänge entfällt.
Energieanwendungen
Eine ebenso interessante praktische Richtung kann der weit verbreitete Einsatz von Magnetlagern in Schlüsseleinheiten von Mechanismen angesehen werden. Ihre Installation löst das ernsthafte Problem des Verschleißes des Ausgangsmaterials.
Klassische Lager verschleißen bekanntlich recht schnell – sie sind ständig hohen mechanischen Belastungen ausgesetzt. In manchen Bereichen bedeutet der Austausch dieser Teile nicht nur zusätzliche Kosten, sondern auch ein hohes Risiko für die Personen, die die Maschine warten. halten die Arbeitsfähigkeit um ein Vielfaches länger, daher ist ihr Einsatz bei extremen Bedingungen sehr zu empfehlen. Insbesondere in der Kernkraft, Windtechnik oder Industrie mit extrem niedrigen/hohen Temperaturen.

Flugzeuge
Bei der Problematik der Umsetzung der Magnetschwebetechnik stellt sich die berechtigte Frage: Wann wird endlich ein vollwertiges Flugzeug, in dem Magnetschwebetechnik eingesetzt wird, hergestellt und der fortschrittlichen Menschheit präsentiert? Immerhin gibt es indirekte Beweise dafür, dass solche "UFOs" existierten. Nehmen Sie zum Beispiel die indischen "Vimanas" der ältesten Ära oder Hitlers "Disketten", die uns bereits zeitlich näher gekommen sind und unter anderem elektromagnetische Methoden zur Organisation der Auftriebskraft verwenden. Erhaltene ungefähre Zeichnungen und sogar Fotos von Betriebsmodellen. Die Frage bleibt offen: Wie kann man all diese Ideen zum Leben erwecken? Aber das Geschäft moderner Erfinder geht nicht über nicht sehr praktikable Prototypen hinaus. Oder sind das vielleicht noch zu geheime Informationen?
Die Idee zu dieser Lektion wurde von dem Projekt der Kickstarter-Crowdfunding-Plattform namens "Air Bonsai" inspiriert, wirklich schön und mysteriös, das von den Japanern gemacht wurde.
Aber jedes Rätsel lässt sich erklären, wenn man hineinschaut. Tatsächlich handelt es sich um Magnetschweben, wenn ein Objekt von oben schwebt und ein Elektromagnet von der Schaltung gesteuert wird. Lassen Sie uns gemeinsam versuchen, dieses mysteriöse Projekt umzusetzen.

Wir fanden heraus, dass die Kickstarter-Schaltung ziemlich komplex war, ohne Mikrocontroller. Es gab keine Möglichkeit, ihre analoge Schaltung zu finden. Tatsächlich ist das Prinzip der Levitation bei genauerem Hinsehen ziemlich einfach. Sie müssen ein magnetisches Stück über einem anderen magnetischen Stück "schweben" lassen. Die weitere Hauptarbeit bestand darin, das Herunterfallen des schwebenden Magneten zu verhindern.
Es wurde auch vorgeschlagen, dass dies mit einem Arduino viel einfacher ist, als zu versuchen, den Schaltplan eines japanischen Geräts zu verstehen. Tatsächlich stellte sich heraus, dass alles viel einfacher war.
Magnetschwebetechnik besteht aus zwei Teilen: einem Basisteil und einem schwebenden (schwebenden) Teil.
Base
Dieser Teil befindet sich unten, der aus einem Magneten besteht, um ein kreisförmiges Magnetfeld zu erzeugen, und Elektromagneten, um dieses Magnetfeld zu steuern.
Jeder Magnet hat zwei Pole: Nord und Süd. Experimente zeigen, dass sich Gegensätze anziehen und gleiche Pole abstoßen. Vier zylindrische Magnete sind in einem Quadrat angeordnet und haben die gleiche Polarität, wodurch ein kreisförmiges Magnetfeld nach oben gebildet wird, um jeden Magneten mit dem gleichen Pol dazwischen herauszudrücken.
Im Allgemeinen gibt es vier Elektromagnete, sie sind in einem Quadrat angeordnet, zwei symmetrische Magnete sind ein Paar und ihr Magnetfeld ist immer entgegengesetzt. Der Hall-Sensor und die Schaltung treiben Elektromagnete an. Wir erzeugen entgegengesetzte Pole an Elektromagneten, indem wir Strom durch sie hindurchfließen.
Schwimmendes Teil
Das Teil enthält einen Magneten, der über der Basis schwebt und einen kleinen Blumentopf oder andere Gegenstände tragen kann.
Der Magnet von oben wird durch das Magnetfeld der unteren Magnete angehoben, da diese die gleichen Pole haben. In der Regel neigt er jedoch dazu, zu fallen und sich voneinander angezogen zu fühlen. Um zu verhindern, dass die Oberseite des Magneten umkippt und herunterfällt, erzeugen die Elektromagnete dank des Hall-Effekt-Sensors Magnetfelder zum Drücken oder Ziehen, um den schwebenden Abschnitt auszugleichen. Die Elektromagnete werden von zwei Achsen X und Y gesteuert, wodurch der obere Magnet im Gleichgewicht und schwebend gehalten wird.
Die Ansteuerung von Elektromagneten ist nicht einfach und erfordert einen PID-Regler, auf den im nächsten Schritt ausführlich eingegangen wird.
Schritt 2: PID-Regler (PID)

Aus Wikipedia: "Ein Proportional-Integral-Differential-Regler (PID) ist ein Gerät in einem Regelkreis mit Rückkopplung. Er wird in automatischen Regelsystemen verwendet, um ein Regelsignal zu erzeugen, um die erforderliche Genauigkeit und Qualität des Einschwingvorgangs zu erhalten. Der PID-Regler erzeugt ein Steuersignal, das aus einer Summe von drei Termen besteht, von denen der erste proportional zur Differenz zwischen dem Eingangssignal und dem Istwertsignal (Fehlersignal) ist, der zweite das Integral des Fehlersignals ist und der dritte ist die Ableitung des Fehlersignals."
Einfach ausgedrückt: „Der PID-Regler berechnet den 'Fehler'-Wert als Differenz zwischen dem gemessenen [Input] und der gewünschten Einstellung. Der Controller versucht, den Fehler zu minimieren, indem er [output] anpasst."
Sie teilen dem PID also mit, was gemessen werden soll (Input), welchen Wert Sie wünschen und eine Variable, die diesen Wert unterstützt. Der PID-Regler passt dann den Ausgang so an, dass der Eingang der Einstellung entspricht.
Beispielsweise: Im Auto haben wir drei Werte (Input, Installation, Output) - die Geschwindigkeit, die gewünschte Geschwindigkeit bzw. den Winkel des Gaspedals.
In diesem Projekt:
- Der Eingang ist der Echtzeitwert des Hallsensors, der kontinuierlich aktualisiert wird, wenn sich die Position des schwimmenden Magneten in Echtzeit ändert.
- Der Sollwert ist der Wert des Hallsensors, der gemessen wird, wenn sich der Schwebemagnet in der Gleichgewichtsposition befindet, in der Mitte des Magnetfußes. Dieser Index ist fest und ändert sich im Laufe der Zeit nicht.
- Das Ausgangssignal ist die Drehzahl zur Ansteuerung der Elektromagnete.
Vielen Dank an die Arduino-Community für das Schreiben einer PID-Bibliothek, die sehr einfach zu verwenden ist. Weitere Informationen zur Arduino PID finden Sie auf der offiziellen Arduino-Website. Wir müssen ein Paar Arduino PID-Controller verwenden, einen für die X-Achse und einen für die Y-Achse.
Schritt 3: Zubehör

Die Zubehörliste für den Unterricht erweist sich als anständig. Nachfolgend finden Sie eine Liste der Komponenten, die Sie für dieses Projekt kaufen sollten. Stellen Sie sicher, dass Sie alles haben, bevor Sie beginnen. Einige der Komponenten sind sehr beliebt und Sie werden sie wahrscheinlich in Ihrem eigenen Lager oder zu Hause finden.

Schritt 4: Werkzeuge
Hier ist eine Liste der am häufigsten verwendeten Tools:
- Lötkolben
- Handsäge
- Multimeter
- Bohren
- Oszilloskop (optional, Sie können ein Multimeter verwenden)
- Tischbohrer
- Heißkleber
- Zange
Schritt 5: LM324 Operationsverstärker, L298N Treiber und SS495a

LM324 Operationsverstärker
Operationsverstärker (Operationsverstärker) sind einige der wichtigsten, am weitesten verbreiteten und vielseitigsten Schaltungen, die heute verwendet werden.
Wir verwenden einen Operationsverstärker, um das Signal des Hall-Sensors zu verstärken, um die Empfindlichkeit zu erhöhen, damit das Arduino das sich ändernde Magnetfeld leicht erkennen kann. Das Ändern einiger mV am Ausgang des Hallsensors nach dem Durchlaufen des Verstärkers kann sich im Arduino um mehrere hundert Einheiten ändern. Dies ist notwendig, um einen reibungslosen und stabilen Betrieb des PID-Reglers zu gewährleisten.
Der gängige Operationsverstärker, den wir gewählt haben, ist der LM324, er ist billig und Sie können ihn in jedem Elektronikgeschäft kaufen. Der LM324 verfügt über 4 interne Verstärker, die einen flexiblen Einsatz ermöglichen, jedoch werden in diesem Projekt nur zwei Verstärker benötigt, einer für die X-Achse und einer für die Y-Achse.
L298N-Modul
Die doppelte H-Brücke L298N wird häufig verwendet, um die Geschwindigkeit und Richtung von zwei Gleichstrommotoren zu steuern oder einfach einen bipolaren Schrittmotor zu steuern. Der L298N kann mit 5 bis 35 VDC Motoren verwendet werden.
Es gibt auch einen eingebauten 5V-Regler, so dass Sie bei einer Versorgungsspannung von bis zu 12V auch das 5V-Netzteil von der Platine anschließen können.
Dieses Projekt verwendet den L298N, um zwei Paare von Magnetspulen anzutreiben und verwendet den 5-V-Ausgang, um den Arduino und den Hall-Sensor mit Strom zu versorgen.
Pinbelegung der Module:
- Out 2: Elektromagnetpaar X
- Out 3: Elektromagnetpaar Y
- Stromeingang: DC 12V-Eingang
- GND: Masse
- 5V-Ausgang: 5V für Arduino- und Hall-Sensoren
- EnA: Aktiviert das PWM-Signal für Ausgang 2
- In1: Freigabe für Ausgang 2
- In2: Aktivieren für Out 2
- In3: Freigabe für Ausgang 3
- In4: Freigabe für Ausgang 3
- EnB: Aktiviert PWM-Signal für Out3
Arduino-Verbindung: Wir müssen 2 Jumper in den Pins EnA und EnB entfernen und dann 6 Pins In1, In2, In3, In4, EnA, EnB mit Arduino verbinden.
SS495a Hall-Sensor
SS495a ist ein linearer Hall-Effekt-Sensor mit Analogausgang. Bitte beachten Sie den Unterschied zwischen Analogausgang und Digitalausgang, Sie können in diesem Projekt keinen Sensor mit Digitalausgang verwenden, dieser hat nur zwei Zustände 1 oder 0, Sie können also keine Magnetfeldausgabe messen.
Der analoge Sensor ergibt einen Spannungsbereich von 250 bis Vcc, den Sie mit dem Arduino-Analogeingang auslesen können. Zur Messung des Magnetfeldes sowohl in der X- als auch in der Y-Achse werden zwei Hallsensoren benötigt.
Schritt 6: NdFeB (Neodym-Eisen-Bor) Neodym-Magnete

Aus Wikipedia: "Neodym ist ein chemisches Element, ein Seltenerdmetall mit einer silbrig-weißen Farbe mit goldener Tönung. Es gehört zur Gruppe der Lanthanoide. Es oxidiert leicht an der Luft. Entdeckt 1885 vom österreichischen Chemiker Karl Auer von Welsbach. Wird als Bestandteil von Legierungen mit Aluminium und Magnesium für die Flugzeug- und Raketenwissenschaft verwendet."
Neodym ist ein ferromagnetisches Metall (insbesondere weist es antiferromagnetische Eigenschaften auf), was bedeutet, dass es wie Eisen magnetisiert werden kann, um ein Magnet zu werden. Seine Curie-Temperatur beträgt jedoch 19 K (-254 ° C), daher tritt sein Magnetismus in seiner reinen Form nur bei extrem niedrigen Temperaturen auf. Neodym-Verbindungen mit Übergangsmetallen wie Eisen können jedoch Curie-Temperaturen weit über Raumtemperatur aufweisen und werden zur Herstellung von Neodym-Magneten verwendet.
Stark ist das Wort, das verwendet wird, um einen Neodym-Magneten zu beschreiben. Sie können keine Ferritmagnete verwenden, da ihr Magnetismus zu schwach ist. Neodym-Magnete sind viel teurer als Ferrit-Magnete. Kleine Magnete werden für die Basis verwendet, große Magnete für den schwebenden / schwebenden Teil.
Beachtung! Sie müssen bei der Verwendung von Neodym-Magneten vorsichtig sein, da ihr starker Magnetismus Sie schädigen oder die Daten Ihrer Festplatte oder anderer elektronischer Geräte zerstören kann, die von Magnetfeldern beeinflusst werden.
Rat! Sie können zwei Magnete trennen, indem Sie sie horizontal ziehen, Sie können sie nicht in die entgegengesetzte Richtung trennen, da ihr Magnetfeld zu stark ist. Sie sind auch sehr zerbrechlich und brechen leicht.
Schritt 7: Bereiten Sie die Basis vor

Verwendet einen kleinen Terrakotta-Topf, der häufig für den Anbau von Sukkulenten oder Kakteen verwendet wird. Gegebenenfalls können Sie auch einen Keramiktopf oder Holztopf verwenden. Verwenden Sie einen 8-mm-Bohrer, um ein Loch in den Boden des Topfes zu bohren, das verwendet wird, um die DC-Buchse zu halten.
Schritt 8: 3D-Druck des schwimmenden Teils

Wenn Sie einen 3D-Drucker haben, großartig. Sie haben die Möglichkeit, alles damit zu machen. Wenn kein Drucker vorhanden ist, verzweifeln Sie nicht, denn Sie können den günstigen 3D-Druckservice nutzen, der derzeit sehr beliebt ist.
Für das Laserschneiden befinden sich die Dateien auch im obigen Archiv - die Datei AcrylicLaserCut.dwg (dies ist autocad). Das Acrylteil wird verwendet, um die Magnete und Elektromagnete zu tragen, der Rest wird verwendet, um die Oberfläche des Terrakottatopfs zu bedecken.
Schritt 9: SS495a Hall-Sensormodul vorbereiten


Schneiden Sie das PCB-Layout in zwei Teile, einen zum Anschließen des Hallsensors und den anderen an die LM324-Schaltung. Bringen Sie zwei Magnetsensoren senkrecht zur Platine an. Verwenden Sie dünne Drähte, um die beiden Pins der VCC-Sensoren miteinander zu verbinden, machen Sie dasselbe mit den GND-Pins. Ausgangskontakte sind getrennt.
Schritt 10: Operationsverstärkerschaltung
Löten Sie die Buchse und die Widerstände gemäß dem Diagramm auf die Platine und stellen Sie sicher, dass die beiden Potentiometer zur späteren leichteren Kalibrierung in die gleiche Richtung ausgerichtet sind. Verbinden Sie den LM324 mit der Buchse und verbinden Sie dann die beiden Ausgänge des Hallsensormoduls mit der Operationsverstärkerschaltung.
Verbinden Sie die beiden Ausgangsdrähte des LM324 mit dem Arduino. 12V Eingang mit 12V Eingang des L298N Moduls, 5V Ausgang des L298N Moduls zu 5V Potentiometer.
Schritt 11: Zusammenbau der Elektromagnete
Montieren Sie die Elektromagnete auf einer Acrylplatte, sie werden in vier Löchern in der Nähe der Mitte befestigt. Ziehen Sie die Schrauben fest, um Bewegungen zu vermeiden. Da die Elektromagnete zentralsymmetrisch sind, sind sie den Polen immer entgegengesetzt, so dass die Drähte an der Innenseite der Elektromagnete miteinander verbunden sind und die Drähte an der Außenseite der Elektromagneten mit dem L298N verbunden sind.
Ziehen Sie die Drähte unter der Acrylplatte durch die angrenzenden Löcher, um eine Verbindung zum L298N herzustellen. Der Kupferdraht ist mit einer Isolierschicht bedeckt, daher müssen Sie ihn mit einem Messer entfernen, bevor Sie sie zusammenlöten können.
Schritt 12: Sensormodul und Magnete
Verwenden Sie Heißkleber, um das Sensormodul zwischen den Elektromagneten zu befestigen. Beachten Sie, dass jeder Sensor quadratisch mit zwei Elektromagneten sein sollte, einen auf der Vorderseite und einen auf der Rückseite. Versuchen Sie, die beiden Sensoren so zentral wie möglich zu kalibrieren, damit sie sich nicht überlappen, wodurch der Sensor am effizientesten wird.
Der nächste Schritt besteht darin, die Magnete auf Acrylbasis zu montieren. Durch die Kombination von zwei D15 * 4 mm Magneten und einem D15 * 3 mm Magneten zu einem Zylinder werden Magnete und Elektromagnete gleich hoch. Montieren Sie die Magnete zwischen den Elektromagnetpaaren, beachten Sie, dass die Pole der nach oben gerichteten Magnete gleich sein müssen.
Schritt 13: Gleichstromanschluss und L298N 5V-Ausgang

Löten Sie die Gleichstrombuchse mit zwei Drähten und verwenden Sie einen Schrumpfschlauch. An den Eingang des L298N-Moduls angeschlossener DC-Stromanschluss, dessen 5V-Ausgang den Arduino mit Strom versorgt.
Schritt 14: L298N und Arduino

Verbinden Sie das L298N-Modul mit Arduino gemäß dem obigen Diagramm:
L298N → Arduino
5V → VCC
Masse → Masse
EnA → 7
B1 → 6
B2 → 5
B3 → 4
B4 → 3
EnB → 2

Schritt 15: Arduino Pro Mini-Programmierer

Da der Arduino pro mini keinen seriellen USB-Port besitzt, müssen Sie einen externen Programmierer anschließen. FTDI Basic wird verwendet, um den Pro Mini zu programmieren (und mit Strom zu versorgen).
15.01.2018 , 7,129 Ansichten
Dieses hausgemachte Produkt ist ein Levitron mit einer kontrollierten Suspension. Das Design und das Schema sind recht einfach, sodass selbst ein unerfahrener Funkamateur und ein Liebhaber hausgemachter Produkte es zusammenbauen können. Der Artikel beschreibt die Schritt-für-Schritt-Anleitung zum Zusammenbau des Levitron, nach der es keine Probleme mit der Leistung geben sollte!
Levitron-Schaltung
Was wird benötigt, um ein Levitron herzustellen?
- IRF740A Bipolartransistor [Preiswert kaufen ]
- Multiplexer IN74LS157N
- Hallsensor SS443A [Preiswert kaufen ]
- Diode 1N4007 [Preiswert kaufen ]
- 12V LED
- Widerstände [Preiswert kaufen]
- Schalter (Nicht Schalter !!)
- Leiterplatte [Preiswert kaufen ]
- Wickeldraht ∅ 0,4 mm
- Neodym-Magnete in verschiedenen Größen [Preiswert kaufen ]
- Stromversorgung 5V 3A [Preiswert kaufen ]
- Sperrholz und dünnes Plastik
Levitron herstellen
Der erste Schritt besteht darin, das Gehäuse zusammenzubauen, in dem die gesamte Schaltung einschließlich der Spule montiert wird. Das Gehäuse kann nach dem unten stehenden Schema hergestellt werden, oder Sie können Ihre eigene Version entwickeln.

Zuerst schneiden wir alle Details der unteren Basis aus Sperrholz aus und verwenden PVA-Kleber, um sie zu montieren.


Dann schneiden wir die Elemente der Gestelle aus und kleben sie ebenfalls mit Hilfe von Kleber.





Nachdem die Karosserie zusammengebaut ist, können Sie sie in jeder Farbe lackieren, damit sie solide und attraktiv aussieht, aber dies ist natürlich nicht erforderlich.

Vor dem Zusammenbau der Schaltung muss die Platine mit einer Dichtung in das Gehäuse eingebaut werden. Die Dichtung wird benötigt, um einen Abstand zwischen Gehäuse und Platine zu schaffen, damit die Schenkel der Teile vollständig in die Löcher eintauchen und es bei der Montage keine Probleme geben würde.




Dann schneiden wir den Teil aus, in dem wir Löcher für die LED und den Schalter machen. Dieser Artikel wird die Spulenhalterung sein.

Mit Hilfe von Sekundenkleber montieren wir dieses Teil am Rack.


Jetzt müssen Sie eine Stange aufnehmen, deren Durchmesser 10 mm betragen sollte.


Dann schneiden wir Kunststoffwände mit einem Durchmesser von 45 mm aus.


Mit Hilfe von Sekundenkleber beschichten wir die Außenkanten der Wände und den Untergrund zur Befestigung.

Wir fädeln den Draht vorsichtig ein.


Wir schneiden den Draht mit einem Rand ab, machen einen Einschnitt an der Wand, legen das Drahtende dort hin und fixieren es mit Heißkleber, um ein Ausblühen zu vermeiden.


Entfernen Sie dann mit einer Klinge alle Unregelmäßigkeiten.

Unsere Rolle ist fertig. Jetzt installieren wir es mit Hilfe von Sekundenkleber am Körper, wie auf dem Foto unten.






Dann montieren wir den Schalter und die LED am Gehäuse und verlöten sie sofort an den ihnen zugeordneten Drähten.


Dann löten wir die Spulendrähte und Hallsensoren. Hallsensordrähte müssen lang genug sein, um das Ende der Spule zu erreichen.


Biegen Sie dann die Hallsensoren mit der Sensorfläche nach außen.

Nun befestigen wir die Sensoren mit Isolierband wie in der Abbildung unten gezeigt. Durch diese Montageart wird es in Zukunft möglich, den Abstand zwischen den Sensoren problemlos zu verändern. Zusätzlich ist es notwendig, die Sensoren mit Gummibändern zu fixieren.


Dann führen wir die Sensoren in das Spulenloch und zentrieren sie. Zu diesen Zwecken wurde zusätzlich ein Klerikalgummi getragen.

Wir befestigen alle Drähte mit Hilfe von Kunststoffklemmen.

Jetzt ist unser Levitron einsatzbereit!


Levitron-Testversion
Wir schließen die Stromversorgung an.

Durch die Änderung des Abstands zwischen den Sensoren ändern wir auch die Länge des Federwegs.

Es bleibt nur noch, den Magneten im Sensorbereich zu platzieren und die Wunder des Schwebens zu genießen!))


Hausgemachtes Video - Levitron mit kontrollierter Federung









