Was ist der Modul des Kraftimpulses. Körperimpulskonzept. Impulserhaltungssatz
Impuls der Macht. Körperimpuls
Dynamische Grundgrößen: Kraft, Masse, Impuls eines Körpers, Kraftmoment, Drehimpuls.
Kraft ist eine Vektorgröße, die ein Maß für die Wirkung anderer Körper oder Felder auf einen bestimmten Körper ist.
Stärke ist gekennzeichnet durch:
Modul
Richtung
Anwendungspunkt
Bei SI wird die Kraft in Newton gemessen.
Um zu verstehen, was eine Kraft von einem Newton ist, müssen wir uns daran erinnern, dass eine auf einen Körper ausgeübte Kraft seine Geschwindigkeit ändert. Erinnern wir uns außerdem an die Trägheit von Körpern, die, wie wir uns erinnern, mit ihrer Masse verbunden ist. So,
Ein Newton ist eine solche Kraft, die die Geschwindigkeit eines Körpers mit einem Gewicht von 1 kg pro Sekunde um 1 m / s ändert.
Beispiele für Kräfte sind:
· Schwere- die Kraft, die infolge der Gravitationswechselwirkung auf den Körper einwirkt.
· Elastische Kraft- die Kraft, mit der der Körper einer äußeren Belastung standhält. Sie wird durch die elektromagnetische Wechselwirkung von Körpermolekülen verursacht.
· Die Stärke von Archimedes- die Kraft, die damit verbunden ist, dass der Körper ein bestimmtes Flüssigkeits- oder Gasvolumen verdrängt.
· Stützreaktionskraft- die Kraft, mit der die Stütze auf den Körper einwirkt.
· Reibungskraft- die Widerstandskraft gegen die relative Verschiebung der sich berührenden Oberflächen der Körper.
· Kraft der Oberflächenspannung - die Kraft, die an der Grenzfläche zweier Medien entsteht.
· Körpergewicht- die Kraft, mit der der Körper auf eine horizontale Stütze oder vertikale Aufhängung einwirkt.
Und andere Kräfte.
Die Stärke wird mit einem speziellen Gerät gemessen. Dieses Gerät wird als Dynamometer bezeichnet (Abb. 1). Der Kraftmesser besteht aus einer Feder 1, deren Spannung uns die Kraft anzeigt, einem Pfeil 2, der entlang einer Skala 3 gleitet, einer Anschlagstange 4, die verhindert, dass die Feder zu stark gedehnt wird, und einem Haken 5, an dem die Last anliegt suspendiert.
Reis. 1. Dynamometer (Quelle)
Auf den Körper können viele Kräfte einwirken. Um die Bewegung eines Körpers richtig zu beschreiben, ist es zweckmäßig, den Begriff der resultierenden Kräfte zu verwenden.
Die resultierende Kraft ist eine Kraft, deren Wirkung die Wirkung aller auf den Körper einwirkenden Kräfte ersetzt (Abb. 2).
Wenn man die Regeln für das Arbeiten mit Vektorgrößen kennt, kann man leicht erraten, dass die Resultierende aller auf den Körper einwirkenden Kräfte die Vektorsumme dieser Kräfte ist.
Reis. 2. Die Resultierende zweier auf den Körper einwirkender Kräfte
Da wir außerdem die Bewegung eines Körpers in einem beliebigen Koordinatensystem betrachten, ist es normalerweise von Vorteil, nicht die Kraft selbst, sondern ihre Projektion auf die Achse zu berücksichtigen. Die Projektion der Kraft auf die Achse kann negativ oder positiv sein, da die Projektion eine skalare Größe ist. In Abbildung 3 sind also die Projektionen der Kräfte gezeigt, die Projektion der Kraft ist negativ und die Projektion der Kraft ist positiv.

Reis. 3. Kraftprojektionen auf die Achse
In dieser Lektion haben Sie und ich unser Verständnis des Konzepts der Stärke vertieft. Wir haben uns an die Maßeinheiten für Kraft und das Gerät, mit dem Kraft gemessen wird, erinnert. Außerdem haben wir untersucht, welche Kräfte in der Natur existieren. Schließlich haben wir gelernt, wie man sich verhält, wenn mehrere Kräfte auf den Körper einwirken.
Gewicht, eine physikalische Größe, eine der Haupteigenschaften der Materie, die ihre Trägheits- und Gravitationseigenschaften bestimmt. Dementsprechend unterscheidet man zwischen träger Masse und gravitativer Masse (schwer, gravitativ).
Der Begriff der Masse wurde von I. Newton in die Mechanik eingeführt. In der klassischen Newtonschen Mechanik ist Masse in der Definition des Impulses (Impuls) eines Körpers enthalten: Impuls R proportional zur Körpergeschwindigkeit v, p = mv(eins). Der Proportionalitätskoeffizient ist ein konstanter Wert für einen gegebenen Körper m- und es gibt Body Mass. Eine äquivalente Definition der Masse erhält man aus der Bewegungsgleichung der klassischen Mechanik f = ma(2). Dabei ist Masse der Proportionalitätskoeffizient zwischen der auf den Körper wirkenden Kraft F und die dadurch verursachte Beschleunigung des Körpers ein... Die durch die Beziehungen (1) und (2) bestimmte Masse wird Trägheitsmasse oder Trägheitsmasse genannt; es charakterisiert die dynamischen Eigenschaften eines Körpers, ist ein Maß für die Trägheit eines Körpers: Bei konstanter Kraft ändert sich der Zustand seiner Bewegung um so weniger, je größer die Masse des Körpers ist ( desto größer ist seine Trägheit).
Wenn man auf verschiedene Körper mit der gleichen Kraft einwirkt und deren Beschleunigungen misst, ist es möglich, das Verhältnis der Masse dieser Körper zu bestimmen: m 1: m 2: m 3 ... = a 1: a 2: a 3 ...; Wenn eine der Massen als Maßeinheit verwendet wird, können Sie die Masse der übrigen Körper ermitteln.
In Newtons Gravitationstheorie tritt Masse in einer anderen Form auf – als Quelle des Gravitationsfeldes. Jeder Körper erzeugt ein Gravitationsfeld proportional zur Masse des Körpers (und wird durch das Gravitationsfeld anderer Körper beeinflusst, dessen Kraft ebenfalls proportional zur Masse der Körper ist). Dieses Feld bewirkt die Anziehung jedes anderen Körpers zu diesem Körper mit einer Kraft, die durch das Newtonsche Gravitationsgesetz bestimmt wird:
![]() (3)
(3)
wo R- Abstand zwischen Körpern, g ist die universelle Gravitationskonstante, a m 1 und m2- Massen von anziehenden Körpern. Aus Formel (3) erhält man leicht eine Formel für Gewichte R Körpermasse m im Gravitationsfeld der Erde: P = mg (4).
Hier g = G * M / r 2 die Beschleunigung des freien Falls im Gravitationsfeld der Erde ist und R » R- der Radius der Erde. Die durch die Beziehungen (3) und (4) bestimmte Masse wird als Gravitationsmasse des Körpers bezeichnet.
Im Prinzip folgt nirgendwo, dass die Masse, die das Gravitationsfeld erzeugt, auch die Trägheit desselben Körpers bestimmt. Die Erfahrung hat jedoch gezeigt, dass Trägheitsmasse und Gravitationsmasse zueinander proportional sind (und bei der üblichen Wahl der Maßeinheiten numerisch gleich sind). Dieses grundlegende Naturgesetz wird Äquivalenzprinzip genannt. Seine Entdeckung ist mit dem Namen von G. Galileo verbunden, der feststellte, dass alle Körper auf der Erde mit der gleichen Beschleunigung fallen. A. Einstein hat dieses (von ihm zuerst formulierte) Prinzip als Grundlage der Allgemeinen Relativitätstheorie aufgestellt. Das Äquivalenzprinzip wurde experimentell mit sehr hoher Genauigkeit festgestellt. Zum ersten Mal (1890-1906) wurde von L. Eotvos eine genaue Überprüfung der Gleichheit der trägen und gravitativen Massen durchgeführt, der feststellte, dass die Massen mit einem Fehler von ~ 10 -8 zusammenfallen. 1959-64 reduzierten die amerikanischen Physiker R. Dicke, R. Krotkov und P. Roll den Fehler auf 10 -11 und 1971 die sowjetischen Physiker VB Braginsky und V. I. Panov - auf 10 -12.
Das Äquivalenzprinzip ermöglicht die natürlichste Bestimmung der Körpermasse durch Wiegen.
Ursprünglich wurde Masse (zB von Newton) als Maß für die Menge der Materie angesehen. Diese Definition hat nur für den Vergleich homogener Körper aus dem gleichen Material eine klare Bedeutung. Es betont die Additivität der Masse – die Masse eines Körpers ist gleich der Summe der Masse seiner Teile. Die Masse eines homogenen Körpers ist proportional zu seinem Volumen, daher kann der Begriff der Dichte eingeführt werden - Masse pro Volumeneinheit eines Körpers.
In der klassischen Physik ging man davon aus, dass sich die Masse eines Körpers bei keinem Prozess ändert. Dies entsprach dem Gesetz der Erhaltung der Masse (Materie), das von M. V. Lomonosov und A. L. Lavoisier entdeckt wurde. Insbesondere besagt dieses Gesetz, dass bei jeder chemischen Reaktion die Summe der Massen der Anfangskomponenten gleich der Summe der Massen der Endkomponenten ist.
Eine tiefere Bedeutung hat der Begriff der Masse in der Mechanik von A. Einsteins spezieller Relativitätstheorie erhalten, die die Bewegung von Körpern (oder Teilchen) mit sehr hohen Geschwindigkeiten betrachtet – vergleichbar mit der Lichtgeschwindigkeit mit ~ 3 10 10 cm / sek. In der neuen Mechanik - sie wird relativistische Mechanik genannt - ist die Beziehung zwischen Impuls und Teilchengeschwindigkeit gegeben durch die Beziehung:
![]() (5)
(5)
Bei niedrigen Geschwindigkeiten ( v << C) verwandelt sich diese Beziehung in die Newtonsche Beziehung p = mv... Daher ist der Wert m 0 heißt Ruhemasse und die Masse eines bewegten Teilchens m ist definiert als der geschwindigkeitsabhängige Proportionalitätsbeiwert zwischen P und v:
![]() (6)
(6)
In Anbetracht dieser Formel sagen sie, dass die Masse eines Teilchens (Körpers) mit zunehmender Geschwindigkeit wächst. Eine solche relativistische Zunahme der Masse eines Teilchens mit Zunahme seiner Geschwindigkeit muss bei der Konstruktion von Beschleunigern für hochenergetische geladene Teilchen berücksichtigt werden. Restmenge m 0(Masse im Bezugssystem des Partikels) ist die wichtigste innere Eigenschaft des Partikels. Alle Elementarteilchen haben streng definierte Werte m 0 inhärent in dieser Art von Partikeln.
Es ist zu beachten, dass in der relativistischen Mechanik die Definition der Masse aus der Bewegungsgleichung (2) nicht der Definition der Masse als Proportionalitätskoeffizienten zwischen Impuls und Teilchengeschwindigkeit entspricht, da die Beschleunigung nicht mehr parallel zur Kraft, die sie verursacht hat, und die Masse erhält man in Abhängigkeit von der Richtung der Teilchengeschwindigkeit.
Nach der Relativitätstheorie ist die Masse eines Teilchens m verbunden mit ihrer Energie E Verhältnis:
![]() (7)
(7)
Die Ruhemasse bestimmt die innere Energie des Teilchens – die sogenannte Ruheenergie E 0 = m 0 s 2... Somit ist Energie immer mit Masse verbunden (und umgekehrt). Daher existieren getrennt (wie in der klassischen Physik) der Massenerhaltungssatz und der Energieerhaltungssatz nicht - sie sind zu einem einzigen Gesetz der Erhaltung der Gesamtenergie (d. h. einschließlich der Ruheenergie der Teilchen) zusammengefasst. Eine näherungsweise Aufteilung in Energieerhaltungssatz und Massenerhaltungssatz ist in der klassischen Physik nur möglich, wenn die Teilchengeschwindigkeiten klein sind ( v << C) und Partikeltransformationsprozesse finden nicht statt.
In der relativistischen Mechanik ist Masse kein zusätzliches Merkmal eines Körpers. Wenn sich zwei Teilchen zu einem zusammengesetzten stabilen Zustand verbinden, entsteht ein Energieüberschuss (gleich der Bindungsenergie) D E was der Masse D . entspricht m = D E / s 2... Daher ist die Masse eines zusammengesetzten Teilchens um den Wert D . kleiner als die Summe der Massen seiner konstituierenden Teilchen E / s 2(der sogenannte Massendefekt). Dieser Effekt ist bei Kernreaktionen besonders ausgeprägt. Zum Beispiel die Masse des Deuterons ( D) kleiner ist als die Summe der Protonenmassen ( P) und Neutronen ( n); Defekt Masse D m verbunden mit Energie Z.B Gammaquant ( g), die bei der Bildung eines Deuterons entsteht: p + n -> d + g, E g = Dmc 2... Der Massendefekt, der bei der Bildung eines zusammengesetzten Teilchens entsteht, spiegelt die organische Verbindung zwischen Masse und Energie wider.
Die Einheit der Masse im CGS-Einheitensystem ist Gramm und in Internationales Einheitensystem SI - Kilogramm... Die Masse von Atomen und Molekülen wird normalerweise in atomaren Masseneinheiten gemessen. Es ist üblich, die Masse von Elementarteilchen entweder in Einheiten der Masse eines Elektrons mich, oder in Energieeinheiten, die die Ruheenergie des entsprechenden Teilchens angeben. Die Masse eines Elektrons beträgt also 0,511 MeV, die Masse eines Protons beträgt 1836,1 mich, oder 938,2 MeV usw.
Die Natur der Masse ist eines der wichtigsten ungelösten Probleme der modernen Physik. Es ist allgemein anerkannt, dass die Masse eines Elementarteilchens durch die damit verbundenen Felder (elektromagnetisch, nuklear und andere) bestimmt wird. Die quantitative Theorie der Masse wurde jedoch noch nicht erstellt. Es gibt auch keine Theorie, die erklärt, warum die Massen von Elementarteilchen ein diskretes Wertespektrum bilden, und noch mehr, die es Ihnen ermöglicht, dieses Spektrum zu bestimmen.
In der Astrophysik bestimmt die Masse eines Körpers, die ein Gravitationsfeld erzeugt, den sogenannten Gravitationsradius des Körpers Rgr = 2GM / s 2... Aufgrund der Gravitationsanziehung kann keine Strahlung, einschließlich Licht, nach außen über die Oberfläche eines Körpers mit einem Radius . hinausgehen R =< R гр ... Sterne dieser Größe sind unsichtbar; daher wurden sie "schwarze Löcher" genannt. Solche Himmelskörper sollten im Universum eine wichtige Rolle spielen.
Impuls der Macht. Körperimpuls
Der Impulsbegriff wurde in der ersten Hälfte des 17. Jahrhunderts von Rene Descartes eingeführt und dann von Isaac Newton verfeinert. Nach Newton, der den Impuls als den Betrag der Bewegung bezeichnete, ist dies ein Maß dafür, proportional zur Geschwindigkeit des Körpers und seiner Masse. Moderne Definition: Der Körperimpuls ist eine physikalische Größe, die dem Produkt der Körpermasse durch seine Geschwindigkeit entspricht:
Aus obiger Formel geht zunächst hervor, dass der Impuls eine vektorielle Größe ist und seine Richtung mit der Richtung der Körpergeschwindigkeit übereinstimmt, die Maßeinheit des Impulses ist:
= [kg · m / s]
Betrachten wir, wie diese physikalische Größe mit den Bewegungsgesetzen zusammenhängt. Schreiben wir das zweite Newtonsche Gesetz unter Berücksichtigung, dass die Beschleunigung die Änderung der Geschwindigkeit über die Zeit ist:

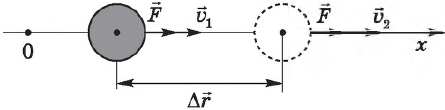
Es besteht ein Zusammenhang zwischen der auf den Körper wirkenden Kraft, genauer gesagt den resultierenden Kräften und der Impulsänderung. Die Größe des Kraftprodukts für eine bestimmte Zeit wird als Kraftimpuls bezeichnet. Aus obiger Formel ist ersichtlich, dass die Impulsänderung des Körpers gleich dem Impuls der Kraft ist.
Welche Effekte lassen sich mit dieser Gleichung beschreiben (Abb. 1)?

Reis. 1. Verbindung des Kraftimpulses mit dem Impuls des Körpers (Quelle)
Ein Pfeil, der von einem Bogen geschossen wird. Je länger der Kontakt der Bogensehne mit dem Pfeil (∆t) dauert, desto stärker ändert sich der Impuls des Pfeils (∆) und desto höher ist folglich seine Endgeschwindigkeit.
Zwei kollidierende Kugeln. Während sich die Kugeln berühren, wirken sie mit gleich großen Kräften aufeinander ein, wie uns das dritte Newtonsche Gesetz lehrt. Das bedeutet, dass auch ihre Impulsänderungen gleich groß sein müssen, auch wenn die Massen der Kugeln nicht gleich sind.
Nach der Analyse der Formeln können zwei wichtige Schlussfolgerungen gezogen werden:
1. Gleiche Kräfte, die während der gleichen Zeit wirken, bewirken bei verschiedenen Körpern die gleichen Impulsänderungen, unabhängig von deren Masse.
2. Ein und dieselbe Impulsänderung eines Körpers kann entweder durch Einwirken einer kleinen Kraft über einen langen Zeitraum oder durch Einwirken einer kurzzeitigen großen Kraft auf denselben Körper erreicht werden.
Nach dem zweiten Newtonschen Gesetz können wir schreiben:
t = ∆ = ∆ / ∆t
Das Verhältnis der Impulsänderung des Körpers zur Zeitdauer, in der diese Änderung erfolgt ist, ist gleich der Summe der auf den Körper wirkenden Kräfte.
Nach der Analyse dieser Gleichung sehen wir, dass das zweite Newtonsche Gesetz es uns erlaubt, die Klasse der zu lösenden Probleme zu erweitern und Probleme einzubeziehen, bei denen sich die Masse von Körpern im Laufe der Zeit ändert.
Wenn wir versuchen, Probleme mit veränderlicher Masse von Körpern mit der üblichen Formulierung des zweiten Newtonschen Gesetzes zu lösen:
dann würde der Versuch einer solchen Lösung zu einem Fehler führen.
Ein Beispiel hierfür ist das bereits erwähnte Düsenflugzeug oder die Weltraumrakete, die bei ihrer Bewegung Treibstoff verbrennt und dessen Verbrennungsprodukte in den umgebenden Raum geschleudert werden. Natürlich nimmt die Masse eines Flugzeugs oder einer Rakete mit dem Verbrauch von Treibstoff ab.
MOMENT DER KRAFT- der Wert, der die Rotationswirkung der Kraft charakterisiert; hat die Dimension des Produkts aus Länge und Stärke. Unterscheiden Moment der Kraft relativ zum Mittelpunkt (Punkt) und relativ zur Achse.
MS. relativ zum Zentrum Ö namens Anzahl der Vektoren m 0, gleich dem Vektorprodukt des Radiusvektors R genommen von Ö bis zum Kraftangriffspunkt F , auf Kraft m 0 = [rF ] oder in anderer Schreibweise m 0 = R F (Reis.). Numerisch M. s. gleich dem Produkt des Kraftmoduls pro Schulter h, d. h. um die Länge der Senkrechten, die von Ö auf der Kraftwirkungslinie oder doppelte Fläche

ein Dreieck, das in der Mitte gebaut ist Ö und Stärke:
gerichteter Vektor m 0 senkrecht zur Durchgangsebene Ö und F ... Die Seite, auf die es geht m 0 wird bedingt ausgewählt ( m 0 - axialer Vektor). Für ein rechtshändiges Koordinatensystem ist der Vektor m 0 ist in die Richtung gerichtet, aus der die gewaltsame Drehung gegen den Uhrzeigersinn sichtbar ist.
MS. relativ zur z-Achse heißt. Skalar M z gleich der Projektion auf die Achse z Vektor M. c. relativ zu jedem Zentrum Ö auf dieser Achse genommen; Größe M z kann auch als Projektion auf eine Ebene definiert werden hu senkrecht zur z-Achse die Fläche des Dreiecks OAB oder als Moment der Projektion F xy Stärke F im Flugzeug hu bezogen auf den Schnittpunkt der z-Achse mit dieser Ebene. Zu.,
In den letzten beiden Ausdrücken ist M. s. als positiv angesehen, wenn die Kraftumdrehung F xy sichtbar von put. das Ende der z-Achse gegen den Uhrzeigersinn (im rechten Koordinatensystem). MS. relativ zu den Koordinatenachsen Oxyz kann auch analytisch berechnet werden. f-lam:
wo Fx, Fy, Fz- Kraftvorsprünge F auf den Koordinatenachsen, x, y, z- Punktkoordinaten EIN Anwendung von Kraft. Die Mengen Mx, My, Mz gleich den Projektionen des Vektors m 0 zu den Koordinatenachsen.
Lass die Körpermasse m für ein kleines Zeitintervall Δ T die wirkende Kraft Unter der Wirkung dieser Kraft ändert sich die Geschwindigkeit des Körpers um ![]() Daher in der Zeit Δ T der Körper bewegte sich mit Beschleunigung
Daher in der Zeit Δ T der Körper bewegte sich mit Beschleunigung

Aus dem Grundgesetz der Dynamik ( Newtons zweites Gesetz) folgt:

Eine physikalische Größe, die dem Produkt aus der Masse des Körpers und der Geschwindigkeit seiner Bewegung entspricht, heißt Körperimpuls(oder Menge an Bewegung). Der Impuls eines Körpers ist eine Vektorgröße. Die SI-Einheit für Impuls ist Kilogramm-Meter pro Sekunde (kg m / s).
Eine physikalische Größe, die dem Produkt einer Kraft zum Zeitpunkt ihrer Wirkung entspricht, heißt Kraftimpuls ... Der Kraftimpuls ist auch eine Vektorgröße.
In neuen Begriffen Newtons zweites Gesetz lässt sich wie folgt formulieren:
UNDDie Impulsänderung des Körpers (Impuls) ist gleich dem Kraftimpuls.
Nachdem der Impuls des Körpers mit dem Buchstaben bezeichnet wurde, kann das zweite Newtonsche Gesetz in der Form geschrieben werden
![]()
In dieser allgemeinen Form formulierte Newton selbst den zweiten Hauptsatz. Die Kraft in diesem Ausdruck ist die Resultierende aller auf den Körper ausgeübten Kräfte. Diese Vektorgleichheit kann in Projektionen auf die Koordinatenachsen geschrieben werden:
Somit ist die Änderung der Projektion des Impulses des Körpers auf eine der drei zueinander senkrechten Achsen gleich der Projektion des Kraftimpulses auf dieselbe Achse. Betrachten Sie als Beispiel eindimensional Bewegung, d. h. die Bewegung des Körpers entlang einer der Koordinatenachsen (zum Beispiel die Achse OY). Lassen Sie den Körper mit einer Anfangsgeschwindigkeit υ 0 unter Einwirkung der Schwerkraft frei fallen; Herbstzeit ist T... Lass uns die Achse lenken OY senkrecht nach unten. Schwerkraftimpuls F t = mg während T ist gleich mgt... Dieser Impuls ist gleich der Impulsänderung des Körpers
Dieses einfache Ergebnis stimmt mit der Kinematik übereinFormelfür die Geschwindigkeit einer gleichmäßig beschleunigten Bewegung... In diesem Beispiel blieb der Kraftmodul während des gesamten Zeitintervalls unverändert T... Ändert sich die Kraft betragsmäßig, so muss der Mittelwert der Kraft in den Ausdruck für den Impuls der Kraft eingesetzt werden F Mi im Zeitintervall seiner Aktion. Reis. 1.16.1 veranschaulicht ein Verfahren zur Bestimmung des Impulses einer zeitabhängigen Kraft.
Wir wählen auf der Zeitachse ein kleines Intervall Δ T während der die Kraft F (T) bleibt praktisch unverändert. Kraftimpuls F (T) Δ T rechtzeitig T wird gleich der Fläche der schattierten Spalte sein. Wenn die gesamte Zeitachse im Intervall von 0 bis liegt T in kleine Intervalle aufteilen Δ Tich, und dann die Kraftimpulse in allen Intervallen aufsummieren Δ Tich, dann ist der Gesamtkraftstoß gleich der Fläche, die mit der Zeitachse eine gestufte Kurve bildet. In der Grenze (Δ Tich→ 0) diese Fläche ist gleich der durch den Graphen begrenzten Fläche F (T) und die Achse T... Diese Methode zur Bestimmung des Kraftimpulses aus der Kurve F (T) ist allgemein und auf alle Gesetze der Kraftänderung mit der Zeit anwendbar. Mathematisch reduziert sich das Problem auf integrieren Funktionen F (T) im Intervall.
Der Kraftimpuls, dessen Graph in Abb. 1.16.1, im Bereich von T 1 = 0 von bis T 2 = 10 s ist gleich:
In diesem einfachen Beispiel
![]()
Teilweise mittelstark F cp kann bestimmt werden, wenn der Zeitpunkt seiner Wirkung und der dem Körper übertragene Impuls bekannt sind. Zum Beispiel kann ein starker Schlag eines Fußballspielers auf einen Ball mit einem Gewicht von 0,415 kg ihm eine Geschwindigkeit von υ = 30 m / s verleihen. Die Einwirkzeit beträgt ungefähr 8 · 10 –3 s.
Impuls P der Ball durch den Aufprall erworben wird, ist:
Daher ist die durchschnittliche Stärke F Mi, mit der der Fuß des Fußballers beim Schlag auf den Ball einwirkte, ist:
![]()
Dies ist eine sehr große Macht. Es entspricht ungefähr dem Gewicht eines 160 kg schweren Körpers.
Wenn die Bewegung des Körpers während der Krafteinwirkung entlang einer bestimmten krummlinigen Bahn erfolgt, können sich die Anfangs- und Endimpulse des Körpers nicht nur in der Größe, sondern auch in der Richtung unterscheiden. Um die Impulsänderung zu bestimmen, ist es in diesem Fall praktisch, zu verwenden Pulsdiagramm
, das die Vektoren darstellt und sowie den Vektor ![]() gebaut nach der Parallelogrammregel. Als Beispiel ist Abb. 1.16.2 zeigt das Impulsdiagramm für einen Ball, der von einer rauen Wand abprallt. Kugelmasse m prallt mit einer Geschwindigkeit im Winkel α zur Normalen auf die Wand (Achse OCHSE) und prallte mit einer Geschwindigkeit unter einem Winkel β davon ab. Beim Kontakt mit der Wand wirkte auf die Kugel eine bestimmte Kraft, deren Richtung mit der Richtung des Vektors übereinstimmt
gebaut nach der Parallelogrammregel. Als Beispiel ist Abb. 1.16.2 zeigt das Impulsdiagramm für einen Ball, der von einer rauen Wand abprallt. Kugelmasse m prallt mit einer Geschwindigkeit im Winkel α zur Normalen auf die Wand (Achse OCHSE) und prallte mit einer Geschwindigkeit unter einem Winkel β davon ab. Beim Kontakt mit der Wand wirkte auf die Kugel eine bestimmte Kraft, deren Richtung mit der Richtung des Vektors übereinstimmt
Bei einem normalen Fall einer Kugel mit einer Masse m auf eine elastische Wand mit Geschwindigkeit, nach dem Abprallen hat der Ball Geschwindigkeit. Daher ist die Impulsänderung des Balls während der Abprallzeit ![]()
In Projektionen auf die Achse OCHSE dieses Ergebnis kann in Skalarform geschrieben werden Δ Px = –2mυ x... Achse OCHSE von der Wand weg gerichtet (wie in Abb. 1.16.2), also υ x < 0 и ΔPx> 0. Daher ist der Modul Δ P Impulsänderung hängt mit dem Modul υ der Kugelgeschwindigkeit durch das Verhältnis Δ . zusammen P = 2mυ.
Impuls (Bewegungsumfang) ist eine vektorielle physikalische Größe, die ein Maß für die mechanische Bewegung eines Körpers ist. In der klassischen Mechanik ist der Impuls eines Körpers gleich dem Produkt der Masse m dieser Körper mit seiner Geschwindigkeit v, die Richtung des Impulses stimmt mit der Richtung des Geschwindigkeitsvektors überein:
Systemimpuls Teilchen ist die Vektorsumme der Impulse ihrer einzelnen Teilchen: p = (Summe) p ich, wo p ich Ist der Impuls des i-ten Teilchens.
Der Satz über die Impulsänderung des Systems: der Gesamtimpuls des Systems kann nur durch Einwirkung äußerer Kräfte verändert werden: Fout = dp / dt (1), d.h. die Ableitung des Impulses des Systems nach der Zeit ist gleich der Vektorsumme aller äußeren Kräfte, die auf die Teilchen des Systems einwirken. Wie bei einem Teilchen folgt aus Ausdruck (1), dass das Inkrement des Impulses des Systems gleich dem Impuls der Resultierenden aller äußeren Kräfte für das entsprechende Zeitintervall ist:
p2-p1 = t & 0 F extern dt.
In der klassischen Mechanik vollständig Impuls ein System materieller Punkte wird als Vektorgröße bezeichnet, die der Summe der Produkte der Massen materieller Punkte bei ihrer Geschwindigkeit entspricht:
![]()
dementsprechend wird der Wert Impuls eines materiellen Punktes genannt. Dies ist eine Vektorgröße, die in die gleiche Richtung wie die Teilchengeschwindigkeit gerichtet ist. Die SI-Einheit des Impulses ist Kilogramm-Meter pro Sekunde(kgm/s).
Wenn wir es mit einem Körper endlicher Größe zu tun haben, der nicht aus diskreten materiellen Punkten besteht, ist es zur Bestimmung seines Impulses notwendig, den Körper in kleine Teile zu zerlegen, die als materielle Punkte betrachtet und über sie summiert werden können, als Ergebnis wir werden:
Der Impuls des Systems, der von äußeren Kräften nicht beeinflusst (oder kompensiert) wird, besteht rechtzeitig:
Die Impulserhaltung folgt in diesem Fall aus dem zweiten und dritten Newtonschen Gesetz: Nachdem wir Newtons zweites Gesetz für jeden der materiellen Punkte geschrieben haben, aus denen das System besteht, und über alle materiellen Punkte, aus denen das System besteht, aufgrund des dritten Newtonschen Gesetzes summiert haben, Gleichheit erhalten (*).
In der relativistischen Mechanik wird der dreidimensionale Impuls eines Systems nicht wechselwirkender materieller Punkte als Größe bezeichnet
 ,
,
wo ich bin- Gewicht ich materieller Punkt.
Für ein geschlossenes System von nicht wechselwirkenden Materialpunkten bleibt dieser Wert erhalten. Der dreidimensionale Impuls ist jedoch keine relativistisch invariante Größe, da er vom Bezugssystem abhängt. Ein aussagekräftigerer Wert ist der vierdimensionale Impuls, der für einen materiellen Punkt definiert ist als

In der Praxis werden häufig folgende Beziehungen zwischen Masse, Impuls und Energie eines Teilchens verwendet:
Im Prinzip werden für ein System von nicht wechselwirkenden materiellen Punkten deren 4-Impulse aufsummiert. Für wechselwirkende Teilchen in der relativistischen Mechanik sollte man jedoch nicht nur die Impulse der das System bildenden Teilchen berücksichtigen, sondern auch den Impuls des Wechselwirkungsfeldes zwischen ihnen. Daher ist eine viel aussagekräftigere Größe in der relativistischen Mechanik der Energie-Impuls-Tensor, der die Erhaltungssätze vollständig erfüllt.
Impulseigenschaften
· Additivität. Diese Eigenschaft bedeutet, dass der Impuls eines mechanischen Systems, das aus materiellen Punkten besteht, gleich der Summe der Impulse aller im System enthaltenen materiellen Punkte ist.
· Invarianz in Bezug auf die Drehung des Bezugsrahmens.
· Erhaltung. Der Impuls ändert sich nicht bei Wechselwirkungen, die nur die mechanischen Eigenschaften des Systems ändern. Diese Eigenschaft ist gegenüber Galileis Transformationen invariant, die Eigenschaften der kinetischen Energieerhaltung, der Impulserhaltung und des zweiten Newtonschen Gesetzes reichen aus, um die mathematische Formel für den Impuls abzuleiten.
Konservierungsgesetz und Puls (Das Gesetz der Impulserhaltung)- Die Vektorsumme der Impulse aller Körper des Systems ist ein konstanter Wert, wenn die Vektorsumme der auf das System einwirkenden äußeren Kräfte gleich Null ist.
In der klassischen Mechanik wird der Impulserhaltungssatz meist als Folge der Newtonschen Gesetze abgeleitet. Aus den Newtonschen Gesetzen lässt sich zeigen, dass bei Bewegung im leeren Raum der Impuls zeitlich erhalten bleibt und bei Wechselwirkung seine Änderungsgeschwindigkeit durch die Summe der aufgebrachten Kräfte bestimmt wird.
Wie alle fundamentalen Erhaltungssätze ist der Impulserhaltungssatz nach dem Satz von Noether mit einer der fundamentalen Symmetrien verbunden – der Homogenität des Raums
Die Impulsänderung des Körpers ist gleich dem Impuls der Resultierenden aller auf den Körper einwirkenden Kräfte. Dies ist eine andere Formulierung des zweiten Newtonschen Gesetzes


Körperimpuls
Der Impuls eines Körpers ist eine Größe gleich dem Produkt der Masse des Körpers durch seine Geschwindigkeit.
Es sei daran erinnert, dass es sich um einen Körper handelt, der als materieller Punkt dargestellt werden kann. Der Impuls des Körpers ($ p $) wird auch als Bewegungsbetrag bezeichnet. Der Impulsbegriff wurde von René Descartes (1596-1650) in die Physik eingeführt. Später tauchte der Begriff „Impuls“ auf (impulsus bedeutet im Lateinischen „Anstoß“). Impuls ist eine Vektorgröße (wie Geschwindigkeit) und wird durch die Formel ausgedrückt:
$ p↖ (→) = mυ↖ (→) $
Die Richtung des Impulsvektors stimmt immer mit der Richtung der Geschwindigkeit überein.
Die Impulseinheit in SI ist der Impuls eines Körpers mit einer Masse von $ 1 $ kg, der sich mit einer Geschwindigkeit von $ 1 $ m / s bewegt, daher ist die Einheit eines Impulses $ 1 $ kg $ · $ m / S.
Wirkt auf den Körper (Materialpunkt) während des Zeitintervalls $ ∆t $ eine konstante Kraft, so ist auch die Beschleunigung konstant:
$ a↖ (→) = ((υ_2) ↖ (→) - (υ_1) ↖ (→)) / (∆t) $
wobei $ (υ_1) ↖ (→) $ und $ (υ_2) ↖ (→) $ die Anfangs- und Endgeschwindigkeit des Körpers sind. Setzen wir diesen Wert in den Ausdruck des zweiten Newtonschen Gesetzes ein, erhalten wir:
$ (m ((υ_2) ↖ (→) - (υ_1) ↖ (→))) / (∆t) = F↖ (→) $
Wenn wir die Klammern öffnen und den Ausdruck für den Impuls des Körpers verwenden, erhalten wir:
$ (p_2) ↖ (→) - (p_1) ↖ (→) = F↖ (→) ∆t $
Dabei ist $ (p_2) ↖ (→) - (p_1) ↖ (→) = ∆p↖ (→) $ die Impulsänderung während der Zeit $ ∆t $. Dann nimmt die vorherige Gleichung die Form an:
$ ∆p↖ (→) = F↖ (→) ∆t $
Der Ausdruck $ ∆p↖ (→) = F↖ (→) ∆t $ ist eine mathematische Darstellung des zweiten Newtonschen Gesetzes.
Das Kraftprodukt zum Zeitpunkt seiner Wirkung heißt Kraftimpuls... So die Impulsänderung eines Punktes ist gleich der Impulsänderung der auf ihn wirkenden Kraft.
Der Ausdruck $ ∆p↖ (→) = F↖ (→) ∆t $ heißt Körperbewegungsgleichung... Es ist zu beachten, dass ein und dieselbe Aktion – eine Änderung des Impulsimpulses eines Punktes – mit einer kleinen Kraft über einen langen Zeitraum und mit einer großen Kraft in einem kurzen Zeitraum erzielt werden kann.
Der Impuls der tel. Impulsänderungsgesetz
Der Impuls (Impuls) eines mechanischen Systems ist ein Vektor gleich der Summe der Impulse aller materiellen Punkte dieses Systems:
$ (p_ (System)) ↖ (→) = (p_1) ↖ (→) + (p_2) ↖ (→) + ... $
Die Änderungs- und Impulserhaltungssätze sind eine Folge des zweiten und dritten Newtonschen Gesetzes.
Betrachten Sie ein System bestehend aus zwei Körpern. Die Kräfte ($ F_ (12) $ und $ F_ (21) $ in der Abbildung, mit denen die Körper des Systems miteinander wechselwirken, nennt man innerlich.
Auf das System wirken neben inneren Kräften auch äußere Kräfte $ (F_1) ↖ (→) $ und $ (F_2) ↖ (→) $. Für jeden Körper können wir die Gleichung $ ∆p↖ (→) = F↖ (→) ∆t $ schreiben. Wenn wir die linke und rechte Seite dieser Gleichungen addieren, erhalten wir:
$ (∆p_1) ↖ (→) + (∆p_2) ↖ (→) = ((F_ (12)) ↖ (→) + (F_ (21)) ↖ (→) + (F_1) ↖ (→) + (F_2) ↖ (→)) t $
Nach dem dritten Newtonschen Gesetz ist $ (F_ (12)) ↖ (→) = - (F_ (21)) ↖ (→) $.
Somit,
$ (∆p_1) ↖ (→) + (∆p_2) ↖ (→) = ((F_1) ↖ (→) + (F_2) ↖ (→)) ∆t $
Auf der linken Seite befindet sich eine geometrische Summe der Impulsänderungen aller Körper des Systems, gleich der Impulsänderung des Systems selbst - $ (∆p_ (System)) ↖ (→) $ Konto kann die Gleichheit $ (∆p_1) ↖ (→) + (∆p_2) ↖ (→) = ((F_1) ↖ (→) + (F_2) ↖ (→)) t $ geschrieben werden:
$ (∆p_ (System)) ↖ (→) = F↖ (→) ∆t $
wobei $ F↖ (→) $ die Summe aller auf den Körper einwirkenden äußeren Kräfte ist. Das erhaltene Ergebnis bedeutet, dass der Impuls des Systems nur durch äußere Kräfte verändert werden kann und die Impulsänderung des Systems in die gleiche Richtung wie die gesamte äußere Kraft gerichtet ist. Dies ist die Essenz des Gesetzes der Änderung des Impulses eines mechanischen Systems.
Innere Kräfte können den Gesamtimpuls des Systems nicht ändern. Sie verändern nur die Impulse der einzelnen Körper des Systems.
Impulserhaltungssatz
Der Impulserhaltungssatz folgt aus der Gleichung $ (∆p_ (sist)) ↖ (→) = F↖ (→) ∆t $. Wirken keine äußeren Kräfte auf das System, so verschwindet die rechte Seite der Gleichung $ (∆p_ (System)) ↖ (→) = F↖ (→) ∆t $, was bedeutet, dass der Gesamtimpuls des Systems bleibt unverändert:
$ (∆p_ (System)) ↖ (→) = m_1 (υ_1) ↖ (→) + m_2 (υ_2) ↖ (→) = const $
Ein System, auf das keine äußeren Kräfte einwirken oder die resultierenden äußeren Kräfte null sind, heißt abgeschlossen.
Das Impulserhaltungsgesetz besagt:
Der Gesamtimpuls eines geschlossenen Systems von Körpern bleibt für alle Wechselwirkungen der Körper des Systems untereinander konstant.
Das erhaltene Ergebnis gilt für ein System mit beliebig vielen Körpern. Wenn die Summe der äußeren Kräfte ungleich Null ist, aber die Summe ihrer Projektionen in eine Richtung gleich Null ist, ändert sich die Projektion des Impulses des Systems auf diese Richtung nicht. So kann beispielsweise ein System von Körpern auf der Erdoberfläche aufgrund der auf alle Körper wirkenden Schwerkraft nicht als geschlossen angesehen werden, jedoch kann die Summe der Projektionen der Impulse in die horizontale Richtung unverändert bleiben (ohne Reibung ), da in dieser Richtung die Schwerkraft nicht wirkt.
Strahlantrieb
Betrachten wir Beispiele, die die Gültigkeit des Impulserhaltungssatzes bestätigen.
Nehmen Sie einen Baby-Gummiballon, blasen Sie ihn auf und lassen Sie ihn los. Wir werden sehen, dass der Ball selbst in die andere Richtung fliegt, wenn die Luft ihn in eine Richtung verlässt. Die Kugelbewegung ist ein Beispiel für den Düsenantrieb. Es wird durch das Impulserhaltungsgesetz erklärt: Der Gesamtimpuls des Systems "Kugel plus Luft darin" vor dem Luftaustritt ist gleich Null; er muss während der Bewegung gleich Null bleiben; daher bewegt sich die Kugel in die der Ausströmrichtung des Strahls entgegengesetzte Richtung, und zwar mit einer solchen Geschwindigkeit, dass ihr Impuls gleich dem Impuls des Luftstrahls ist.
Reaktive Bewegung wird die Bewegung eines Körpers genannt, die auftritt, wenn sich ein Teil davon mit beliebiger Geschwindigkeit von ihm löst. Aufgrund des Impulserhaltungssatzes ist die Bewegungsrichtung des Körpers entgegengesetzt zur Bewegungsrichtung des abgetrennten Teils.
Raketenflüge basieren auf dem Prinzip des Düsenantriebs. Die moderne Weltraumrakete ist ein sehr komplexes Flugzeug. Die Masse der Rakete setzt sich zusammen aus der Masse des Arbeitsmediums (d. h. den bei der Verbrennung von Treibstoff entstehenden Glühgasen, die in Form eines Jetstreams ausgestoßen werden) und der letzten, oder, wie sie sagen, , die nach dem Ausstoß des Arbeitsmediums aus der Rakete verbleibende "trockene" Masse der Rakete.
Wenn ein Jet-Gasstrahl mit hoher Geschwindigkeit aus einer Rakete ausgestoßen wird, rast die Rakete selbst in die entgegengesetzte Richtung. Nach dem Impulserhaltungssatz muss der von der Rakete aufgenommene Impuls $ m_ (p) υ_p $ gleich dem Impuls $ m_ (Gas) υ_ (Gas) $ der ausgestoßenen Gase sein:
$ m_ (p) υ_p = m_ (Gas) υ_ (Gas) $
Daraus folgt, dass die Raketengeschwindigkeit
$ υ_p = ((m_ (Gas)) / (m_p)) υ_ (Gas) $
Aus dieser Formel ist ersichtlich, dass die Geschwindigkeit der Rakete umso größer ist, je größer die Geschwindigkeit der emittierten Gase und das Verhältnis der Masse des Arbeitskörpers (dh der Masse des Treibstoffs) zur endgültigen ("trockenen") ") Masse der Rakete.
Die Formel $ υ_p = ((m_ (Gas)) / (m_p)) υ_ (Gas) $ ist ungefähr. Dabei wird nicht berücksichtigt, dass die Masse der fliegenden Rakete beim Verbrennen des Treibstoffs immer geringer wird. Die genaue Formel für die Raketengeschwindigkeit wurde 1897 von K. E. Tsiolkovsky erhalten und trägt seinen Namen.
Kraftarbeit
Der Begriff "Arbeit" wurde 1826 von dem französischen Wissenschaftler J. Poncelet in die Physik eingeführt. Wenn im Alltag nur menschliche Arbeit Arbeit genannt wird, dann ist in der Physik und insbesondere in der Mechanik allgemein anerkannt, dass Arbeit mit Gewalt verrichtet wird. Die physische Arbeitsmenge wird normalerweise mit dem Buchstaben $ A $ bezeichnet.
Kraftarbeit Ist ein Maß für die Wirkung einer Kraft in Abhängigkeit von ihrem Modul und ihrer Richtung sowie von der Bewegung des Kraftangriffspunktes. Bei konstanter Kraft und linearer Bewegung wird die Arbeit durch die Gleichheit bestimmt:
$ A = F | ∆r↖ (→) | cosα $
Dabei ist $ F $ die auf den Körper wirkende Kraft, $ ∆r↖ (→) $ die Verschiebung, $ α $ der Winkel zwischen Kraft und Verschiebung.

Die Kraftarbeit ist gleich dem Produkt aus den Modulen von Kraft und Weg und dem Kosinus des Winkels zwischen ihnen, also dem Skalarprodukt der Vektoren $ F↖ (→) $ und $ ∆r↖ (→) $.
Arbeit ist eine skalare Größe. Wenn $ α 0 $, und wenn $ 90 °
Wirken mehrere Kräfte auf den Körper, ist die Gesamtarbeit (die Summe der Arbeit aller Kräfte) gleich der Arbeit der resultierenden Kraft.
Die Arbeitseinheit in SI ist Joule($ 1 $ J). $ 1 $ J ist die Arbeit, die eine $ 1 $ N Kraft auf dem Weg zu $ 1 $ m in Richtung der Wirkung dieser Kraft verrichtet. Diese Einheit ist nach dem englischen Wissenschaftler J. Joule (1818-1889) benannt: $ 1 $ J = $ 1 $ N $ · $ m. Oft werden auch Kilojoule und Millijoule verwendet: $ 1 $ kJ $ = 1.000 $ J, $ 1 $ mJ $ = 0,001 $ J.
Arbeit der Schwerkraft
Betrachten Sie einen Körper, der entlang einer schiefen Ebene mit einem Neigungswinkel $ α $ und einer Höhe $ H $ gleitet.

Lassen Sie uns $ ∆x $ durch $ H $ und $ α $ ausdrücken:
$ ∆x = (H) / (sinα) $
Berücksichtigt man, dass die Schwerkraft $ F_t = mg $ mit der Bewegungsrichtung einen Winkel ($ 90 ° - α $) bildet, erhalten wir mit der Formel $ ∆x = (H) / (sin) α $ einen Ausdruck für die Arbeit der Schwerkraft $ A_g $:
$ A_g = mg · cos (90 ° -α) · (H) / (sinα) = mgH $
Aus dieser Formel ist ersichtlich, dass die Schwerkraftarbeit von der Höhe und nicht vom Neigungswinkel der Ebene abhängt.
Es folgt dem:
- die Schwerkraftarbeit hängt nicht von der Form der Bahn ab, auf der sich der Körper bewegt, sondern nur von der Anfangs- und Endposition des Körpers;
- Wenn sich ein Körper entlang einer geschlossenen Bahn bewegt, ist die Schwerkraftarbeit Null, dh die Schwerkraft ist eine konservative Kraft (Kräfte mit dieser Eigenschaft werden als konservativ bezeichnet).
Reaktionskräfte wirken, ist gleich Null, da die Reaktionskraft ($ N $) senkrecht zur Verschiebung von $ ∆x $ gerichtet ist.
Reibungskraftarbeit
Die Reibungskraft ist der Verschiebung von $ ∆x $ entgegengerichtet und schließt mit ihr einen Winkel $ 180 ° $ ein, daher ist die Arbeit der Reibkraft negativ:
$ A_ (tr) = F_ (tr) ∆x cos180 ° = -F_ (tr) ∆x $
Da $ F_ (tr) = μN, N = mgcosα, ∆x = l = (H) / (sinα), $ dann
$ A_ (tr) = μmgHctgα $
Elastische Kraftarbeit
Auf eine ungedehnte Feder der Länge $ l_0 $ soll eine äußere Kraft $ F↖ (→) $ wirken und sie um $ ∆l_0 = x_0 $ strecken. In Position $ x = x_0F_ (Steuerung) = kx_0 $. Nach dem Aufhören der Kraftwirkung $ F↖ (→) $ am Punkt $ х_0 $ wird die Feder unter der Kraftwirkung $ F_ (Steuerung) $ zusammengedrückt.

Bestimmen wir die Arbeit der elastischen Kraft, wenn sich die Koordinate des rechten Federendes von $ x_0 $ auf $ x $ ändert. Da sich die elastische Kraft in diesem Abschnitt linear ändert, können Sie im Hookeschen Gesetz ihren Durchschnittswert in diesem Abschnitt verwenden:
$ F_ (Strg.) = (Kx_0 + kx) / (2) = (k) / (2) (x_0 + x) $
Dann ist die Arbeit (unter Berücksichtigung, dass die Richtungen $ (F_ (vgl. vergleiche)) ↖ (→) $ und $ (∆x) ↖ (→) $ übereinstimmen) gleich:
$ A_ (Kontrolle) = (k) / (2) (x_0 + x) (x_0-x) = (kx_0 ^ 2) / (2) - (kx ^ 2) / (2) $
Es kann gezeigt werden, dass die Form der letzten Formel nicht vom Winkel zwischen $ (F_ (vgl. vergleiche)) ↖ (→) $ und $ (∆x) ↖ (→) $ abhängt. Die Arbeit der elastischen Kräfte hängt nur von den Verformungen der Feder im Anfangs- und Endzustand ab.
Somit ist die elastische Kraft wie die Schwerkraft eine konservative Kraft.
Kraft der Kraft
Leistung ist eine physikalische Größe, die durch das Verhältnis von Arbeit zu der Zeit, in der sie produziert wird, gemessen wird.
Mit anderen Worten, die Leistung zeigt an, wie viel Arbeit pro Zeiteinheit geleistet wird (in SI - für 1 $ s).
Die Leistung wird durch die Formel bestimmt:
wobei $ N $ die Leistung ist, $ A $ die in der Zeit $ ∆t $ geleistete Arbeit.
Setzt man in die Formel $ N = (A) / (∆t) $ statt Arbeit $ A $ den Ausdruck $ A = F | (∆r) ↖ (→) | cosα $ ein, so erhält man:
$ N = (F | (∆r) ↖ (→) | cosα) / (∆t) = Fυcosα $
Die Leistung ist gleich dem Produkt der Moduli der Kraft- und Geschwindigkeitsvektoren durch den Kosinus des Winkels zwischen diesen Vektoren.
Die SI-Leistung wird in Watt (W) gemessen. Ein Watt ($ 1 $ W) ist eine solche Leistung, bei der $ 1 $ J Arbeit für $ 1 $ s verrichtet wird: $ 1 $ W $ = 1 $ J / s.
Dieses Gerät ist nach dem englischen Erfinder J. Watt (Watt) benannt, der die erste Dampfmaschine baute. J. Watt (1736-1819) selbst verwendete eine andere Leistungseinheit - PS (PS), die er einführte, um die Leistung einer Dampfmaschine und eines Pferdes vergleichen zu können: 1 PS. $ = 735,5 $ W.
In der Technik werden oft größere Leistungseinheiten verwendet - Kilowatt und Megawatt: 1 $ kW $ = 1000 W $, 1 $ MW $ = 1.000.000 $ W.
Kinetische Energie. Das Gesetz der Änderung der kinetischen Energie
Wenn ein Körper oder mehrere interagierende Körper (ein System von Körpern) Arbeit verrichten können, dann sagen sie, dass sie Energie haben.
Das Wort „Energie“ (von griechisch energia – Handlung, Aktivität) wird im Alltag häufig verwendet. So werden zum Beispiel Menschen, die schnell arbeiten können, als energisch bezeichnet und haben viel Energie.
Die Energie, die ein Körper durch Bewegung besitzt, wird als kinetische Energie bezeichnet.
Wie bei der Definition von Energie im Allgemeinen können wir von der kinetischen Energie sagen, dass kinetische Energie die Fähigkeit eines sich bewegenden Körpers ist, Arbeit zu verrichten.
Finden wir die kinetische Energie eines Körpers der Masse $ m $, der sich mit der Geschwindigkeit $ υ $ bewegt. Da kinetische Energie Bewegungsenergie ist, ist der Nullzustand dafür der Zustand, in dem sich der Körper befindet. Nachdem wir die Arbeit gefunden haben, die erforderlich ist, um dem Körper eine bestimmte Geschwindigkeit zu verleihen, werden wir seine kinetische Energie finden.
Dazu berechnen wir die Arbeit auf dem Wegabschnitt $ ∆r↖ (→) $, wenn die Richtungen der Kraftvektoren $ F↖ (→) $ und Weg $ ∆r↖ (→) $ übereinstimmen. In diesem Fall ist die Arbeit gleich
wobei $ ∆x = ∆r $
Für die Bewegung eines Punktes mit der Beschleunigung $ α = const $ hat der Ausdruck für die Bewegung die Form:
$ ∆x = υ_1t + (bei ^ 2) / (2), $
wobei $ υ_1 $ die Anfangsgeschwindigkeit ist.
Setzt man in die Gleichung $ A = F ∆x $ den Ausdruck für $ ∆x $ aus $ ∆x = υ_1t + (bei ^ 2) / (2) $ ein und verwendet Newtons zweites Gesetz $ F = ma $, erhalten wir:
$ A = ma (υ_1t + (at ^ 2) / (2)) = (mat) / (2) (2υ_1 + at) $
Ausdrücken der Beschleunigung in Form der Anfangsgeschwindigkeiten $ υ_1 $ und Endgeschwindigkeit $ υ_2 $ $ a = (υ_2-υ_1) / (t) $ und Einsetzen in $ A = ma (υ_1t + (at ^ 2) / (2)) = (mat) / (2) (2υ_1 + at) $ haben wir:
$ A = (m (υ_2-υ_1)) / (2) (2υ_1 + υ_2-υ_1) $
$ A = (mυ_2 ^ 2) / (2) - (mυ_1 ^ 2) / (2) $
Wenn wir nun die Anfangsgeschwindigkeit mit Null gleichsetzen: $ υ_1 = 0 $, erhalten wir einen Ausdruck für kinetische Energie:
$ E_K = (mυ) / (2) = (p ^ 2) / (2m) $
Ein sich bewegender Körper hat also kinetische Energie. Diese Energie ist gleich der Arbeit, die verrichtet werden muss, um die Geschwindigkeit des Körpers von Null auf den Wert von $ υ $ zu erhöhen.
Aus $ E_K = (mυ) / (2) = (p ^ 2) / (2m) $ folgt, dass die Kraftarbeit, um den Körper von einer Position in eine andere zu bewegen, gleich der Änderung der kinetischen Energie ist:
$ A = E_ (K_2) -E_ (K_1) = ∆E_K $
Gleichheit $ A = E_ (K_2) -E_ (K_1) = ∆E_K $ drückt aus das Theorem über die Änderung der kinetischen Energie.
Änderung der kinetischen Energie des Körpers(Materialpunkt) für eine bestimmte Zeit gleich der Arbeit, die während dieser Zeit durch die auf den Körper einwirkende Kraft verrichtet wird.
Potenzielle Energie
Potentielle Energie ist die Energie, die durch die gegenseitige Anordnung wechselwirkender Körper oder Teile desselben Körpers bestimmt wird.
Da Energie als die Fähigkeit des Körpers definiert ist, Arbeit zu verrichten, wird die potentielle Energie natürlich als Kraftarbeit definiert, die nur von der relativen Position der Körper abhängt. Dies ist die Schwerkraftarbeit $ A = mgh_1-mgh_2 = mgH $ und die Arbeit der elastischen Kraft:
$ A = (kx_0 ^ 2) / (2) - (kx ^ 2) / (2) $
Die potentielle Energie des Körpers, mit der Erde wechselwirkt, heißt eine Größe, die dem Produkt der Masse $ m $ dieses Körpers durch die Erdbeschleunigung $ g $ und der Höhe $ h $ des Körpers über der Erdoberfläche entspricht:
Die potentielle Energie eines elastisch verformten Körpers ist ein Wert gleich dem halben Produkt des Elastizitäts-(Steifigkeits-)Koeffizienten $ k $ des Körpers und dem Quadrat der Verformung $ ∆l $:
$ E_p = (1) / (2) k∆l ^ 2 $
Die Arbeit der konservativen Kräfte (Schwerkraft und Elastizität) unter Berücksichtigung von $ E_p = mgh $ und $ E_p = (1) / (2) k∆l ^ 2 $ wird wie folgt ausgedrückt:
$ A = E_ (p_1) -E_ (p_2) = - (E_ (p_2) -E_ (p_1)) = - ∆E_p $
Mit dieser Formel können Sie die potentielle Energie allgemein definieren.
Die potentielle Energie eines Systems ist eine von der Lage von Körpern abhängige Größe, deren Änderung beim Übergang des Systems vom Anfangszustand in den Endzustand gleich der Arbeit der inneren konservativen Kräfte des Systems ist, mit das umgekehrte Vorzeichen.
Das Minuszeichen auf der rechten Seite der Gleichung $ A = E_ (p_1) -E_ (p_2) = - (E_ (p_2) -E_ (p_1)) = - ∆E_p $ bedeutet bei Schnittkraftarbeit (z. B. fallender Körper auf den Boden unter Einwirkung der Schwerkraft im System "Stein - Erde"), die Energie des Systems nimmt ab. Arbeit und Änderungen der potentiellen Energie im System haben immer entgegengesetzte Vorzeichen.
Da Arbeit nur eine Änderung der potentiellen Energie bestimmt, hat in der Mechanik nur eine Änderung der Energie eine physikalische Bedeutung. Daher ist die Wahl des Nullenergieniveaus willkürlich und wird ausschließlich durch Bequemlichkeitserwägungen bestimmt, beispielsweise durch die Einfachheit des Schreibens der entsprechenden Gleichungen.
Das Gesetz der Veränderung und Erhaltung der mechanischen Energie
Volle mechanische Energie des Systems die Summe seiner kinetischen und potentiellen Energien heißt:
Sie wird durch die Position der Körper (potentielle Energie) und ihre Geschwindigkeit (kinetische Energie) bestimmt.
Nach dem Satz der kinetischen Energie gilt:
$ E_k-E_ (k_1) = A_p + A_ (pr), $
wobei $ A_p $ die Arbeit potentieller Kräfte ist, $ A_ (pr) $ die Arbeit nicht potentieller Kräfte ist.
Die Arbeit der potentiellen Kräfte ist wiederum gleich der Differenz der potentiellen Energie des Körpers im Anfangszustand $ E_ (p_1) $ und im Endzustand $ E_p $. Vor diesem Hintergrund erhalten wir einen Ausdruck für das Änderungsgesetz der mechanischen Energie:
$ (E_k + E_p) - (E_ (k_1) + E_ (p_1)) = A_ (pr) $
wobei die linke Seite der Gleichheit die Änderung der gesamten mechanischen Energie ist und die rechte Seite die Arbeit nicht potentieller Kräfte ist.
So, Gesetz der mechanischen Energieänderung lautet:
Die Änderung der mechanischen Energie des Systems ist gleich der Arbeit aller nicht potentiellen Kräfte.
Ein mechanisches System, in dem nur potentielle Kräfte wirken, wird als konservativ bezeichnet.
Im konservativen System ist $ A_ (pr) = 0 $. das impliziert mechanisches Energieerhaltungsgesetz:
In einem geschlossenen konservativen System bleibt die gesamte mechanische Energie erhalten (verändert sich nicht über die Zeit):
$ E_k + E_p = E_ (k_1) + E_ (p_1) $
Das Gesetz der Erhaltung der mechanischen Energie leitet sich aus den Newtonschen Gesetzen der Mechanik ab, die auf ein System von materiellen Punkten (oder Makroteilchen) anwendbar sind.
Das Gesetz der Erhaltung der mechanischen Energie gilt jedoch auch für ein System von Mikropartikeln, wo die Newtonschen Gesetze selbst nicht mehr gelten.
Der Erhaltungssatz der mechanischen Energie ist eine Folge der Homogenität der Zeit.
Zeitgleichmäßigkeit besteht darin, dass unter gleichen Anfangsbedingungen der Ablauf physikalischer Prozesse nicht vom Zeitpunkt der Entstehung dieser Bedingungen abhängt.
Der Erhaltungssatz der mechanischen Gesamtenergie besagt, dass sich bei einer Änderung der kinetischen Energie in einem konservativen System auch seine potentielle Energie ändern sollte, so dass ihre Summe konstant bleibt. Dies bedeutet die Möglichkeit, eine Energieart in eine andere umzuwandeln.
Entsprechend den verschiedenen Bewegungsformen der Materie werden verschiedene Energiearten betrachtet: mechanisch, innerlich (entspricht der Summe der kinetischen Energie der chaotischen Bewegung der Moleküle relativ zum Massenschwerpunkt des Körpers und der potentiellen Wechselwirkungsenergie von Molekülen untereinander), elektromagnetisch, chemisch (besteht aus der kinetischen Energie der Elektronenbewegung und elektrisch aus der Energie ihrer Wechselwirkung untereinander und mit Atomkernen), nuklear usw. Aus dem Gesagten ist klar dass die Aufteilung der Energie in verschiedene Arten ziemlich willkürlich ist.
Naturphänomene werden normalerweise von der Umwandlung einer Energieart in eine andere begleitet. So führt beispielsweise die Reibung von Teilen verschiedener Mechanismen zur Umwandlung von mechanischer Energie in Wärme, d. h. in innere Energie. Bei Wärmekraftmaschinen hingegen findet eine Umwandlung von innerer Energie in mechanische Energie statt; in galvanischen Zellen wird chemische Energie in elektrische Energie umgewandelt usw.
Derzeit ist der Energiebegriff einer der Grundbegriffe der Physik. Dieses Konzept ist untrennbar mit der Idee der Transformation einer Bewegungsform in eine andere verbunden.
So wird der Energiebegriff in der modernen Physik formuliert:
Energie ist ein allgemeines quantitatives Maß für die Bewegung und Wechselwirkung aller Arten von Materie. Energie entsteht nicht aus dem Nichts und verschwindet nicht, sie kann nur von einer Form in eine andere übergehen. Der Energiebegriff verbindet alle Naturphänomene.
Einfache Mechanismen. Effizienz der Mechanismen
Einfache Mechanismen werden als Geräte bezeichnet, die die Größe oder Richtung der auf den Körper ausgeübten Kräfte ändern.
Sie werden verwendet, um große Lasten mit geringem Kraftaufwand zu bewegen oder zu heben. Dazu gehören der Hebel und seine Varianten - Blöcke (beweglich und fest), Tor, schiefe Ebene und ihre Varianten - Keil, Schraube usw.
Hebelarm. Hebelregel
Der Arm ist ein fester Körper, der sich um eine feste Stütze drehen kann.

Die Hebelregel besagt:
Ein Hebel ist im Gleichgewicht, wenn die auf ihn ausgeübten Kräfte umgekehrt proportional zu seinen Schultern sind:
$ (F_2) / (F_1) = (l_1) / (l_2) $
Aus der Formel $ (F_2) / (F_1) = (l_1) / (l_2) $ unter Anwendung der Proportionseigenschaft (das Produkt der extremen Terme des Proportions ist gleich dem Produkt seiner mittleren Terme), du kann folgende Formel erhalten:
Aber $ F_1l_1 = M_1 $ ist das Kraftmoment, das den Hebel im Uhrzeigersinn dreht, und $ F_2l_2 = M_2 $ ist das Kraftmoment, das den Hebel gegen den Uhrzeigersinn dreht. Somit ist $ M_1 = M_2 $, wie erforderlich.
Der Hebel wurde in der Antike von den Menschen verwendet. Mit seiner Hilfe war es möglich, beim Pyramidenbau im alten Ägypten schwere Steinplatten zu heben. Ohne Hebelwirkung wäre dies nicht möglich gewesen. Tatsächlich wurden zum Beispiel für den Bau der Cheops-Pyramide mit einer Höhe von 147 m mehr als zwei Millionen Felsbrocken verwendet, von denen der kleinste eine Masse von 2,5 $ Tonnen hatte!
Heutzutage sind Hebel sowohl in der Produktion (zB Kräne) als auch im Alltag (Scheren, Drahtschneider, Waagen) weit verbreitet.
Fester Block
Die Wirkung eines festen Blocks ähnelt der Wirkung eines Hebels mit gleichen Armen: $ l_1 = l_2 = r $. Die aufgebrachte Kraft $ F_1 $ ist gleich der Last $ F_2 $ und die Gleichgewichtsbedingung ist:
Fester Block Wird verwendet, wenn die Richtung der Kraft geändert werden muss, ohne ihre Größe zu ändern.
Beweglicher Block
Der bewegliche Block wirkt wie ein Hebel, dessen Arme sind: $ l_2 = (l_1) / (2) = r $. In diesem Fall hat die Gleichgewichtsbedingung die Form:
wobei $ F_1 $ die aufgebrachte Kraft ist, $ F_2 $ die Last. Die Verwendung eines beweglichen Blocks bringt einen doppelten Kraftgewinn.
Polyspast (Blocksystem)

Ein normaler Flaschenzug besteht aus $ n $ beweglichen und $ n $ festen Blöcken. Seine Anwendung gibt einen Kraftzuwachs in 2n-$-Zeiten:
$ F_1 = (F_2) / (2n) $
Antriebsriemenscheibe besteht aus n beweglichen und einem festen Block. Die Verwendung eines Riemenscheibenblocks mit Potenzgesetz ergibt einen Festigkeitsgewinn um das 2-fache ^ n $-fache:
$ F_1 = (F_2) / (2 ^ n) $

Schraube
Die Schraube ist eine schiefe Ebene, die um eine Achse gewickelt ist.

Die Gleichgewichtsbedingung für die auf den Propeller wirkenden Kräfte hat die Form:
$ F_1 = (F_2h) / (2πr) = F_2tgα, F_1 = (F_2h) / (2πR) $

wobei $ F_1 $ - externe Kraft, die auf die Schraube ausgeübt wird und in einem Abstand $ R $ von ihrer Achse wirkt; $ F_2 $ - Kraft, die in Richtung der Schraubenachse wirkt; $ h $ - Schraubensteigung; $ r $ - durchschnittlicher Radius des Gewindes; $ α $ - Neigungswinkel des Gewindes. $ R $ ist die Länge des Arms (Schlüssels), der die Schraube mit einer Kraft von $ F_1 $ dreht.
Effizienz
Leistungszahl (COP) - das Verhältnis von nützlicher Arbeit zu allen aufgewendeten Arbeiten.
Die Effizienz wird oft in Prozent angegeben und mit dem griechischen Buchstaben $ η $ („diese“) bezeichnet:
$ η = (A_п) / (A_3) 100 % $
wobei $ A_n $ nützliche Arbeit ist, $ A_3 $ die gesamte aufgewendete Arbeit.
Nützliche Arbeit ist immer nur ein Teil der Gesamtarbeit, die ein Mensch mit diesem oder jenem Mechanismus verbringt.
Ein Teil der perfekten Arbeit besteht darin, Reibungskräfte zu überwinden. Da $ A_3> A_n $ ist, ist die Effizienz immer kleiner als $ 1 $ (oder $< 100%$).
Da jede der Arbeiten in dieser Gleichheit in Form des Produkts der entsprechenden Kraft und der zurückgelegten Strecke ausgedrückt werden kann, kann sie wie folgt umgeschrieben werden: $ F_1s_1≈F_2s_2 $.
Es folgt dem, Wenn wir mit Hilfe eines wirksamen Mechanismus gewinnen, verlieren wir auf dem Weg genauso oft und umgekehrt... Dieses Gesetz wird die goldene Regel der Mechanik genannt.
Die goldene Regel der Mechanik ist ein ungefähres Gesetz, da sie die Arbeit zur Überwindung der Reibung und der Schwerkraft der verwendeten Geräteteile nicht berücksichtigt. Nichtsdestotrotz kann es bei der Analyse der Funktionsweise eines einfachen Mechanismus sehr nützlich sein.

Dank dieser Regel können wir beispielsweise sofort sagen, dass der in der Abbildung gezeigte Arbeiter mit einer zweifachen Erhöhung der Hubkraft um 10 $ $ cm das gegenüberliegende Ende des Hebels um 20 $ senken muss $cm.
Zusammenstoß von Körpern. Elastischer und unelastischer Stoß
Zur Lösung des Problems der Bewegung von Körpern nach einem Stoß werden die Gesetze der Impulserhaltung und der mechanischen Energie verwendet: Die Werte dieser Größen nach dem Stoß werden aus den bekannten Impulsen und Energien vor dem Stoß bestimmt. Betrachten Sie die Fälle elastischer und unelastischer Stöße.
Ein Schlag wird als absolut unelastisch bezeichnet, wonach die Körper einen einzigen Körper bilden, der sich mit einer bestimmten Geschwindigkeit bewegt. Das Problem der Geschwindigkeit der letzteren wird mit dem Impulserhaltungssatz für ein Körpersystem mit den Massen $ m_1 $ und $ m_2 $ (wenn wir von zwei Körpern sprechen) vor und nach dem Aufprall gelöst:
$ m_1 (υ_1) ↖ (→) + m_2 (υ_2) ↖ (→) = (m_1 + m_2) υ↖ (→) $
Offensichtlich bleibt die kinetische Energie von Körpern während eines unelastischen Aufpralls nicht erhalten (zum Beispiel für $ (υ_1) ↖ (→) = - (υ_2) ↖ (→) $ und $ m_1 = m_2 $ wird sie nach dem Aufprall null) .
Als absolut elastisch wird ein Stoß bezeichnet, bei dem nicht nur die Summe der Impulse erhalten bleibt, sondern auch die Summe der kinetischen Energien der auftreffenden Körper.
Für einen absolut elastischen Stoß gelten die Gleichungen
$ m_1 (υ_1) ↖ (→) + m_2 (υ_2) ↖ (→) = m_1 (υ "_1) ↖ (→) + m_2 (υ" _2) ↖ (→); $
$ (m_ (1) υ_1 ^ 2) / (2) + (m_ (2) υ_2 ^ 2) / (2) = (m_1 (υ "_1) ^ 2) / (2) + (m_2 (υ" _2 ) ^ 2) / (2) $
wobei $ m_1, m_2 $ die Massen der Kugeln sind, $ υ_1, υ_2 $ die Geschwindigkeiten der Kugeln vor dem Aufprall sind, $ υ "_1, υ" _2 $ die Geschwindigkeiten der Kugeln nach dem Aufprall sind.
Anweisungen
Bestimmen Sie die Masse eines sich bewegenden Körpers und messen Sie seine Bewegungen. Nach seiner Wechselwirkung mit einem anderen Körper ändert sich die Geschwindigkeit des untersuchten Körpers. Ziehen Sie in diesem Fall die Anfangsgeschwindigkeit von der Endgeschwindigkeit (nach der Wechselwirkung) ab und multiplizieren Sie die Differenz mit der Körpermasse Δp = m ∙ (v2-v1). Momentangeschwindigkeit mit Radar messen, Körpergewicht - mit Waage. Wenn sich der Körper nach der Interaktion in die entgegengesetzte Richtung zu der vor der Interaktion bewegten Richtung zu bewegen begann, ist die Endgeschwindigkeit negativ. Ist sie positiv, ist sie gewachsen, ist sie negativ, hat sie abgenommen.
Da die Ursache der Geschwindigkeitsänderung eines jeden Körpers Kraft ist, ist sie auch die Ursache der Impulsänderung. Um die Impulsänderung eines beliebigen Körpers zu berechnen, genügt es, den Impuls der Kraft zu bestimmen, die zu einem bestimmten Zeitpunkt auf den gegebenen Körper einwirkt. Verwenden Sie einen Dynamometer, um die Kraft zu messen, die dazu führt, dass der Körper die Geschwindigkeit ändert und ihm eine Beschleunigung verleiht. Messen Sie gleichzeitig mit einer Stoppuhr die Zeit, die diese Kraft auf den Körper einwirkte. Wenn die Kraft den Körper in Bewegung setzt, dann betrachte sie als positiv, aber wenn sie ihre Bewegung verlangsamt, betrachte sie als negativ. Der Impuls der Kraft gleich der Impulsänderung ist das Produkt der Kraft zum Zeitpunkt ihrer Wirkung Δp = F ∙ Δt.
Bestimmung der Momentangeschwindigkeit mit einem Tachometer oder Radar Wenn ein sich bewegender Körper mit einem Tachometer ausgestattet ist (), dann auf seiner Skala oder elektronischen Platine, Geschwindigkeit zu diesem Zeitpunkt. Wenn Sie einen Körper von einem stationären Punkt aus beobachten (), richten Sie das Radarsignal auf ihn, seine Anzeige zeigt einen Momentan Geschwindigkeit Körper zu einem bestimmten Zeitpunkt.
Ähnliche Videos
Kraft ist eine physikalische Größe, die auf einen Körper einwirkt, die ihm insbesondere eine gewisse Beschleunigung verleiht. Finden Impuls Stärke, müssen Sie die Änderung des Bewegungsbetrags bestimmen, d.h. Impuls aber der Körper selbst.

Anweisungen
Die Bewegung eines materiellen Punktes durch den Einfluss einiger Stärke oder Kräfte, die ihm Beschleunigung verleihen. Das Ergebnis der Bewerbung Stärke ein bestimmter Betrag für einen bestimmten Betrag ist der entsprechende Betrag. Impuls Stärke das Maß seiner Wirkung über einen bestimmten Zeitraum heißt: Pc = Fav ∆t, wobei Fav die durchschnittliche Kraft ist, die auf den Körper einwirkt, ∆t das Zeitintervall.
Auf diese Weise, Impuls Stärke gleich ändern Impuls und der Körper: Pc = ∆Pt = m (v - v0), wobei v0 die Anfangsgeschwindigkeit und v die Endgeschwindigkeit des Körpers ist.
Die resultierende Gleichheit spiegelt Newtons zweites Gesetz in Bezug auf das Inertialbezugssystem wider: Die Ableitung der Funktion eines materiellen Punktes nach der Zeit ist gleich dem Wert der konstanten Kraft, die auf ihn einwirkt: Fav ∆t = ∆Pt → Fav = dPt / dt.
Gesamt Impuls ein System mehrerer Körper kann sich nur unter dem Einfluss äußerer Kräfte ändern, und sein Wert ist ihrer Summe direkt proportional. Diese Aussage ist eine Folge des zweiten und dritten Newtonschen Gesetzes. Seien drei wechselwirkende Körper, dann gilt: Pc1 + Pc2 + Pc3 = ∆Pt1 + ∆Pt2 + ∆Pt3, wobei Pci - Impuls Stärke Wirkung auf Körper i; Pti - Impuls Körper ich.
Diese Gleichheit zeigt, dass, wenn die Summe der äußeren Kräfte null ist, die Summe Impuls ein geschlossenes Körpersystem ist immer konstant, obwohl das innere Stärke









