Lösen von linearen Gleichungssystemen. Inkompatible Systeme. Systeme mit einer gemeinsamen Lösung. Private Lösungen. So finden Sie die allgemeine und spezielle Lösung eines linearen Gleichungssystems
Betrachten wir zunächst den Fall, dass die Anzahl der Gleichungen gleich der Anzahl der Variablen ist, d.h. m = n. Dann ist die Matrix des Systems quadratisch, und ihre Determinante heißt Determinante des Systems.
Inverse Matrixmethode
Betrachten Sie in allgemeiner Form das Gleichungssystem AX = B mit einer nicht entarteten quadratischen Matrix A. In diesem Fall gibt es eine inverse Matrix A -1. Lassen Sie uns beide Seiten links mit A -1 multiplizieren. Wir erhalten A -1 AX = A -1 V. Also EX = A -1 B und
Die letzte Gleichheit ist eine Matrixformel, um Lösungen für solche Gleichungssysteme zu finden. Die Verwendung dieser Formel wird als inverse Matrixmethode bezeichnet
Lassen Sie uns zum Beispiel das folgende System mit dieser Methode lösen:

 ;
;


Am Ende der Lösung des Systems können Sie überprüfen, indem Sie die gefundenen Werte in die Gleichungen des Systems einsetzen. Dabei müssen sie zu wahren Gleichheiten werden.
Für das betrachtete Beispiel prüfen wir:

Eine Methode zum Lösen von linearen Gleichungssystemen mit einer quadratischen Matrix nach Cramers Formeln
Sei n = 2:

Wenn beide Seiten der ersten Gleichung mit a 22 multipliziert werden und beide Seiten der zweiten mit (-a 12) und dann die resultierenden Gleichungen addieren, dann schließen wir die Variable x 2 aus dem System aus. Auf ähnliche Weise können Sie die Variable x 1 eliminieren (indem Sie beide Seiten der ersten Gleichung mit (-a 21) und beide Seiten der zweiten mit a 11 multiplizieren). Als Ergebnis erhalten wir das System:

Der Ausdruck in Klammern ist die Systemdeterminante

Wir bezeichnen
Dann nimmt das System die Form an:

Aus dem resultierenden System folgt, dass, wenn die Determinante des Systems 0 ist, das System konsistent und definitiv ist. Seine einzige Lösung kann mit den Formeln berechnet werden:

Wenn = 0 und 1 0 und / oder 2 0 sind, dann haben die Gleichungen des Systems die Form 0 * x 1 = 2 und / oder 0 * x 1 = 2. In diesem Fall ist das System inkonsistent.
Für den Fall, dass = 1 = 2 = 0 ist, ist das System konsistent und unbestimmt (es hat eine unendliche Menge von Lösungen), da es die Form hat:

Satz von Cramer(Wir lassen den Beweis weg). Wenn die Determinante der Matrix des Gleichungssystems ungleich Null ist, hat das System eine eindeutige Lösung, die durch die Formeln bestimmt wird:
 ,
,
wobei j die Determinante der Matrix ist, die aus der Matrix A erhalten wird, indem die j-te Spalte durch eine Spalte mit freien Termen ersetzt wird.
Die obigen Formeln heißen Cramers Formeln.
Als Beispiel verwenden wir diese Methode, um ein System zu lösen, das zuvor mit der inversen Matrixmethode gelöst wurde:



Nachteile der betrachteten Methoden:
1) erheblicher Arbeitsaufwand (Berechnung von Determinanten und Auffinden der inversen Matrix);
2) eingeschränkter Anwendungsbereich (für Systeme mit quadratischer Matrix).
Realwirtschaftliche Situationen werden häufiger durch Systeme modelliert, in denen die Anzahl der Gleichungen und Variablen ziemlich groß ist und es mehr Gleichungen als Variablen gibt, daher ist in der Praxis die folgende Methode üblicher.
Gaußsche Methode (Methode der sukzessiven Eliminierung von Variablen)
Diese Methode wird verwendet, um ein System von m linearen Gleichungen mit n Variablen in allgemeiner Form zu lösen. Sein Wesen liegt in der Anwendung eines Systems äquivalenter Transformationen auf die erweiterte Matrix, mit dessen Hilfe das Gleichungssystem in die Form transformiert wird, in der seine Lösungen (sofern vorhanden) leicht zu finden sind.
Dies ist die Ansicht, in der der obere linke Teil der Systemmatrix eine abgestufte Matrix ist. Dies wird unter Verwendung der gleichen Techniken erreicht, die verwendet wurden, um eine gestufte Matrix zu erhalten, um den Rang zu bestimmen. Gleichzeitig werden elementare Transformationen auf die erweiterte Matrix angewendet, die es ermöglichen, ein äquivalentes Gleichungssystem zu erhalten. Danach hat die erweiterte Matrix die Form:

Das Erhalten einer solchen Matrix wird genannt direkter Kurs Gauss-Methode.
Das Finden der Werte von Variablen aus dem entsprechenden Gleichungssystem heißt umkehren Gauss-Methode. Betrachten wir es.
Beachten Sie, dass die letzten (m - r) Gleichungen die Form haben:
Wenn mindestens eine der Zahlen  ungleich Null ist, ist die entsprechende Gleichheit falsch und das gesamte System wird inkonsistent.
ungleich Null ist, ist die entsprechende Gleichheit falsch und das gesamte System wird inkonsistent.
Daher für jedes Gelenksystem  ... In diesem Fall sind die letzten (m - r) Gleichungen für alle Werte der Variablen die Identitäten 0 = 0 und können beim Lösen des Systems vernachlässigt werden (verwerfen Sie einfach die entsprechenden Zeilen).
... In diesem Fall sind die letzten (m - r) Gleichungen für alle Werte der Variablen die Identitäten 0 = 0 und können beim Lösen des Systems vernachlässigt werden (verwerfen Sie einfach die entsprechenden Zeilen).
Danach nimmt das System die Form an:

Betrachten Sie zuerst den Fall, wenn r = n ist. Dann nimmt das System die Form an:

Aus der letzten Gleichung des Systems lässt sich x r eindeutig ermitteln.
Wenn man x r kennt, ist es möglich, x r -1 daraus eindeutig auszudrücken. Aus der vorherigen Gleichung können wir dann, wenn wir x r und x r -1 kennen, x r -2 usw. ausdrücken. dox 1.
In diesem Fall wird das System also gemeinsam und definitiv sein.








Betrachten wir nun den Fall, wenn r
Aus dieser Gleichung kann die Basisvariable x r durch die Nichtbasisvariablen ausgedrückt werden:

Die vorletzte Gleichung lautet:
Durch Ersetzen des erhaltenen Ausdrucks anstelle von x r ist es möglich, die Basisvariable x r -1 in Form von Nicht-Basisvariablen auszudrücken. Usw. zu variabel x 1. Um eine Lösung für das System zu erhalten, können Sie die nicht-Basisvariablen mit beliebigen Werten gleichsetzen und dann die Basisvariablen mit den erhaltenen Formeln berechnen. In diesem Fall ist das System also konsistent und unbestimmt (mit unendlich vielen Lösungen).
Lassen Sie uns zum Beispiel das Gleichungssystem lösen:




Die Menge der Basisvariablen heißt Basis Systeme. Die Menge der Koeffizientenspalten für sie wird auch genannt Basis(Basisspalten) oder Basis Moll Systemmatrizen. Die Lösung des Systems, in dem alle Nichtbasisvariablen gleich Null sind, heißt Grundlösung.
Im vorherigen Beispiel lautet die Basislösung (4/5; -17/5; 0; 0) (die Variablen x 3 und x 4 (mit 1 und c 2) werden auf Null gesetzt und die Basisvariablen x 1 und x 2 werden durch sie berechnet) ... Um ein Beispiel für eine nicht-basische Lösung zu geben, ist es notwendig, x 3 und x 4 (mit 1 und mit 2) mit beliebigen Zahlen gleichzusetzen, die gleichzeitig ungleich Null sind, und die restlichen Variablen daraus zu berechnen. Für c 1 = 1 und c 2 = 0 erhalten wir beispielsweise eine nichtbasische Lösung - (4/5; -12/5; 1; 0). Durch Substitution lässt sich leicht überprüfen, ob beide Lösungen richtig sind.
Offensichtlich kann es in einem unbestimmten System unendlich viele nicht-basische Lösungen geben. Wie viele Basislösungen kann es geben? Jede Zeile der transformierten Matrix muss einer Basisvariablen entsprechen. Das Problem enthält n Variablen und r in einfachen Strings. Daher kann die Anzahl aller möglichen Mengen von Basisvariablen die Anzahl der Kombinationen von n bis r 2 nicht überschreiten. Es kann weniger sein als  , da es nicht immer möglich ist, das System in eine solche Form umzuwandeln, dass dieser spezielle Satz von Variablen grundlegend wäre.
, da es nicht immer möglich ist, das System in eine solche Form umzuwandeln, dass dieser spezielle Satz von Variablen grundlegend wäre.
Was ist das für eine Art? Dies ist eine solche Form, wenn die aus den Spalten der Koeffizienten für diese Variablen gebildete Matrix gestuft wird und gleichzeitig aus r Zeilen besteht. Jene. der Rang der Koeffizientenmatrix für diese Variablen muss gleich r sein. Sie kann nicht größer als r sein, da die Anzahl der Spalten gleich r ist. Wenn er kleiner als r ist, deutet dies auf eine lineare Abhängigkeit der Spalten für Variablen hin. Solche Spalten können keine Grundlage bilden.
Überlegen wir, welche anderen grundlegenden Lösungen im obigen Beispiel gefunden werden können. Betrachten Sie dazu alle möglichen Kombinationen von vier Variablen, zwei grundlegenden. Es wird solche Kombinationen geben  , und einer davon (x 1 und x 2) wurde bereits berücksichtigt.
, und einer davon (x 1 und x 2) wurde bereits berücksichtigt.
Nehmen wir die Variablen x 1 und x 3. Finden wir den Rang der Koeffizientenmatrix für sie:

Da es gleich zwei ist, können sie einfach sein. Setzen wir die nicht basischen Variablen x 2 und x 4 mit Null gleich: x 2 = x 4 = 0. Dann folgt aus der Formel x 1 = 4/5 - (1/5) * x 4 x 1 = 4 /5, und aus der Formel x 2 = -17/5 + x 3 - - (7/5) * x 4 = -17/5 + x 3 folgt x 3 = x 2 +17/5 = 17/ 5. Somit erhalten wir die Basislösung (4/5; 0; 17/5; 0).
Ebenso können Sie grundlegende Lösungen für die Basisvariablen x 1 und x 4 erhalten - (9/7; 0; 0; -17/7); x 2 und x 4 – (0; –9; 0; 4); x 3 und x 4 - (0; 0; 9; 4).
Die Variablen x 2 und x 3 in diesem Beispiel können nicht als Basis genommen werden, da der Rang der entsprechenden Matrix gleich eins ist, d.h. weniger als zwei:
 .
.
Ein anderer Ansatz zur Bestimmung, ob es möglich ist, eine Basis aus einigen Variablen zu bilden, ist ebenfalls möglich. Bei der Lösung des Beispiels nahm es als Ergebnis der Transformation der Systemmatrix in eine schrittweise Form die Form an:

Durch die Wahl von Variablenpaaren war es möglich, die entsprechenden Minderjährigen dieser Matrix zu berechnen. Es ist leicht zu überprüfen, dass für alle Paare außer x 2 und x 3 diese ungleich Null sind, d.h. die Spalten sind linear unabhängig. Und nur für Spalten mit Variablen x 2 und x 3  , was ihre lineare Beziehung anzeigt.
, was ihre lineare Beziehung anzeigt.
Nehmen wir ein anderes Beispiel. Lösen wir das Gleichungssystem


Die Gleichung, die der dritten Zeile der letzten Matrix entspricht, ist also widersprüchlich - sie führte zur falschen Gleichheit 0 = -1, daher ist dieses System inkompatibel.
Jordan-Gauss-Methode 3 stellt eine Weiterentwicklung der Gauß-Methode dar. Sein Wesen besteht darin, dass die erweiterte Matrix des Systems in die Form umgewandelt wird, in der die Koeffizienten der Variablen die Identitätsmatrix bis zu einer Permutation von Zeilen oder Spalten 4 bilden (wobei r der Rang der Matrix des Systems ist).
Lassen Sie uns das System mit dieser Methode lösen:

Betrachten Sie die erweiterte Systemmatrix:

In dieser Matrix wählen wir ein Einheitselement. Beispielsweise beträgt der Koeffizient bei x 2 in der dritten Einschränkung 5. Wir werden sicherstellen, dass die verbleibenden Zeilen in dieser Spalte Nullen enthalten, d.h. Lassen Sie uns die Spalte einzeln machen. Im Transformationsprozess nennen wir dies Säulefreizügig(Führung, Schlüssel). Die dritte Einschränkung (die dritte Schnur) wird auch aufgerufen freizügig... Mich selber Element, das im Schnittpunkt der auflösenden Zeile und Spalte steht (hier ist es eine Einheit), heißt auch freizügig.
Die erste Zeile enthält nun einen Koeffizienten (-1). Um stattdessen Null zu erhalten, multiplizieren Sie die dritte Zeile mit (-1) und subtrahieren Sie das Ergebnis von der ersten Zeile (d. h. addieren Sie einfach die erste Zeile zur dritten).
Die zweite Zeile enthält den Faktor 2. Um stattdessen Null zu erhalten, multiplizieren Sie die dritte Zeile mit 2 und subtrahieren Sie das Ergebnis von der ersten Zeile.
Das Ergebnis der Transformationen wird sein:

Aus dieser Matrix ist deutlich zu erkennen, dass eine der ersten beiden Restriktionen gestrichen werden kann (die entsprechenden Zeilen sind proportional, d.h. diese Gleichungen folgen aufeinander). Streichen wir zum Beispiel den zweiten:

Das neue System hat also zwei Gleichungen. Eine einzelne Spalte (zweite) wird empfangen, mit einer in der zweiten Reihe. Denken wir daran, dass die Basisvariable x 2 der zweiten Gleichung des neuen Systems entspricht.
Wählen wir die Basisvariable für die erste Zeile. Es kann eine beliebige andere Variable als x 3 sein (da für x 3 die erste Einschränkung einen Nullkoeffizienten enthält, d. h. die Menge der Variablen x 2 und x 3 kann hier nicht einfach sein). Sie können die erste oder vierte Variable nehmen.
Wählen wir x 1. Dann ist das auflösende Element 5, und beide Seiten der auflösenden Gleichung müssen durch fünf geteilt werden, um eins in der ersten Spalte der ersten Zeile zu erhalten.
Stellen wir sicher, dass die restlichen Zeilen (d. h. die zweite Zeile) Nullen in der ersten Spalte haben. Da nun die zweite Zeile nicht Null, sondern 3 enthält, müssen von der zweiten Zeile die Elemente der transformierten ersten Zeile multipliziert mit 3 abgezogen werden.

Aus der resultierenden Matrix kann man direkt eine Basislösung extrahieren, indem man die nicht basischen Variablen mit Null und die basischen mit den freien Termen in den entsprechenden Gleichungen gleichsetzt: (0.8; -3.4; 0; 0). Sie können auch allgemeine Formeln ableiten, die Basisvariablen durch Nicht-Basisvariablen ausdrücken: x 1 = 0,8 - 1,2 x 4; x 2 = -3,4 + x 3 + 1,6 x 4. Diese Formeln beschreiben die gesamte unendliche Menge von Lösungen des Systems (wenn man x 3 und x 4 mit beliebigen Zahlen gleichsetzt, kann man x 1 und x 2 berechnen).
Beachten Sie, dass das Wesen der Transformationen in jeder Phase der Jordan-Gauss-Methode wie folgt war:
1) die auflösende Zeichenfolge wurde durch das auflösende Element geteilt, um eine an ihrer Stelle zu erhalten,
2) Von allen anderen Zeilen wurde die transformierte Auflösung subtrahiert, multipliziert mit dem Element, das in der angegebenen Zeile in der Auflösungsspalte stand, um an Stelle dieses Elements Null zu erhalten.
Betrachten Sie noch einmal die transformierte erweiterte Matrix des Systems:

Dieser Datensatz zeigt, dass der Rang der Matrix von System A gleich r ist.
Im Zuge der obigen Überlegungen haben wir festgestellt, dass das System genau dann gemein ist, wenn  ... Dies bedeutet, dass die erweiterte Matrix des Systems wie folgt aussieht:
... Dies bedeutet, dass die erweiterte Matrix des Systems wie folgt aussieht:

Wenn wir die Nullzeilen verwerfen, erhalten wir, dass der Rang der erweiterten Matrix des Systems ebenfalls r ist.
Satz von Kronecker-Capelli... Das lineare Gleichungssystem ist genau dann konsistent, wenn der Rang der Matrix des Systems gleich dem Rang der erweiterten Matrix dieses Systems ist.
Denken Sie daran, dass der Rang einer Matrix gleich der maximalen Anzahl ihrer linear unabhängigen Zeilen ist. Daraus folgt, dass, wenn der Rang der erweiterten Matrix kleiner ist als die Anzahl der Gleichungen, die Gleichungen des Systems linear abhängig sind und eine oder mehrere von ihnen aus dem System ausgeschlossen werden können (da sie linear sind Kombination der anderen). Das Gleichungssystem ist nur dann linear unabhängig, wenn der Rang der erweiterten Matrix der Anzahl der Gleichungen entspricht.
Darüber hinaus kann für kompatible lineare Gleichungssysteme argumentiert werden, dass das System eine eindeutige Lösung hat, wenn der Rang der Matrix gleich der Anzahl der Variablen ist, und wenn sie kleiner ist als die Anzahl der Variablen, dann das System ist unbestimmt und hat unendlich viele Lösungen.
1Angenommen, es gibt fünf Zeilen in einer Matrix (die ursprüngliche Zeilenreihenfolge ist 12345). Es ist notwendig, die zweite Zeile und die fünfte zu ändern. Damit die zweite Zeile an die Stelle der fünften fällt, "bewegen" Sie sich nach unten, ändern Sie die benachbarten Zeilen dreimal hintereinander: die zweite und dritte (13245), die zweite und vierte (13425) und die zweite und fünfte ( 13452). Damit die fünfte Zeile an die Stelle der zweiten in der ursprünglichen Matrix fällt, ist es dann erforderlich, die fünfte Zeile nur um zwei aufeinanderfolgende Änderungen nach oben zu "verschieben": die fünfte und vierte Zeile (13542) und die fünfte und dritte (15342).
2 Die Anzahl der Kombinationen von n bis r  nennen die Anzahl aller verschiedenen r-elementigen Teilmengen einer n-elementigen Menge (verschiedene Mengen sind solche, die eine unterschiedliche Zusammensetzung von Elementen haben, die Reihenfolge der Auswahl ist nicht wichtig). Es wird nach der Formel berechnet:
nennen die Anzahl aller verschiedenen r-elementigen Teilmengen einer n-elementigen Menge (verschiedene Mengen sind solche, die eine unterschiedliche Zusammensetzung von Elementen haben, die Reihenfolge der Auswahl ist nicht wichtig). Es wird nach der Formel berechnet:  ... Erinnern wir uns an die Bedeutung des Zeichens "!" (Fakultät):
... Erinnern wir uns an die Bedeutung des Zeichens "!" (Fakultät):  0!=1.)
0!=1.)
3Da diese Methode häufiger vorkommt als die zuvor betrachtete Gauss-Methode und im Wesentlichen eine Kombination aus den Vorwärts- und Rückwärtsschritten der Gauß-Methode ist, wird sie manchmal auch als Gauß-Methode bezeichnet, wobei der erste Teil des Namens weggelassen wird.
4 Zum Beispiel  .
.
5Wenn es in der Matrix des Systems keine Einheiten gäbe, wäre es beispielsweise möglich, beide Seiten der ersten Gleichung durch zwei zu teilen, und dann würde der erste Koeffizient zu einer Einheit; oder dergleichen
Wir beschäftigen uns weiterhin mit linearen Gleichungssystemen. Bisher haben wir uns Systeme angesehen, die eine einzige Lösung haben. Solche Systeme können auf beliebige Weise gelöst werden: Substitutionsmethode("Schule"), nach Cramers Formeln, Matrixmethode, Gaußsche Methode... In der Praxis sind jedoch zwei weitere Fälle weit verbreitet, wenn:
1) das System ist inkompatibel (hat keine Lösungen);
2) Das System hat unendlich viele Lösungen.
Für diese Systeme wird die universellste aller Lösungsmethoden verwendet - Gauss-Methode... Tatsächlich führt die Methode der "Schule" zur Antwort, aber in der höheren Mathematik ist es üblich, die Gaußsche Methode der sukzessiven Eliminierung von Unbekannten zu verwenden. Für diejenigen, die mit dem Algorithmus der Gaußschen Methode nicht vertraut sind, studieren Sie bitte zuerst die Lektion Gauss-Methode
Die elementaren Matrixtransformationen selbst sind genau gleich, der Unterschied liegt am Ende der Lösung. Betrachten wir zunächst ein paar Beispiele, wenn das System keine Lösungen hat (inkonsistent).
Beispiel 1
Was fällt Ihnen bei diesem System sofort ins Auge? Die Anzahl der Gleichungen ist kleiner als die Anzahl der Variablen. Es gibt einen Satz, der besagt: "Wenn die Anzahl der Gleichungen im System kleiner ist als die Anzahl der Variablen, dann ist das System entweder inkonsistent oder hat unendlich viele Lösungen." Und es bleibt nur, es herauszufinden.
Der Anfang der Lösung ist ganz gewöhnlich - wir schreiben die erweiterte Matrix des Systems auf und bringen sie mit elementaren Transformationen in eine schrittweise Form:

(1). Im oberen linken Schritt müssen wir (+1) oder (–1) erhalten. In der ersten Spalte gibt es keine solchen Zahlen, daher wird das Neuanordnen der Zeilen nichts ergeben. Die Einheit muss unabhängig organisiert werden, und dies kann auf verschiedene Weise erfolgen. Wir haben dies getan. Zur ersten Zeile addieren Sie die dritte Zeile multipliziert mit (–1).
(2). Jetzt bekommen wir in der ersten Spalte zwei Nullen. Zur zweiten Zeile addieren wir die erste Zeile multipliziert mit 3. Zur dritten Zeile addieren wir die erste Zeile multipliziert mit 5.
(3). Nach der durchgeführten Transformation ist es immer ratsam, nachzuschauen, und kann man die resultierenden Linien vereinfachen? Dürfen. Teilen Sie die zweite Reihe durch 2 und erhalten Sie gleichzeitig das gewünschte (-1) auf dem zweiten Schritt. Teilen Sie die dritte Reihe durch (–3).
(4). Fügen Sie die zweite Zeile in die dritte Zeile ein. Wahrscheinlich haben alle auf die schlechte Linie geachtet, die sich als Ergebnis elementarer Transformationen herausstellte:
![]() ... Dass dies nicht sein kann, ist klar.
... Dass dies nicht sein kann, ist klar.
Tatsächlich schreiben wir die resultierende Matrix um

zurück zum linearen Gleichungssystem:

Wenn als Ergebnis elementarer Transformationen ein String der Form , woλ - eine Zahl ungleich Null, dann ist das System inkompatibel (hat keine Lösungen).
Wie zeichne ich das Ende einer Aufgabe auf? Sie müssen den Satz aufschreiben:
„Als Ergebnis elementarer Transformationen wurde ein String der Form erhalten, wobei λ ≠ 0 ". Antwort: "Das System hat keine Lösungen (inkonsistent)."
Bitte beachten Sie, dass es in diesem Fall kein Backtracking des Gaußschen Algorithmus gibt, es keine Lösungen gibt und einfach nichts zu finden ist.
Beispiel 2
Löse ein System linearer Gleichungen 
Dies ist ein Beispiel für eine Do-it-yourself-Lösung. Komplette Lösung und Antwort am Ende des Tutorials.
Wir erinnern Sie noch einmal daran, dass Ihr Entscheidungsverlauf von unserem Entscheidungsverlauf abweichen kann, die Gauß-Methode keinen eindeutigen Algorithmus vorgibt, Sie die Reihenfolge der Aktionen und die Aktionen selbst jeweils unabhängig voneinander erraten müssen.
Ein weiteres technisches Feature der Lösung: elementare Transformationen können gestoppt werden sofort, sobald eine Zeile des Formulars erschien, in der λ ≠ 0 ... Betrachten Sie ein bedingtes Beispiel: Angenommen, nach der allerersten Transformation wird die Matrix erhalten
 .
.
Diese Matrix ist noch nicht auf eine Stufenform reduziert, aber es sind keine weiteren elementaren Transformationen erforderlich, da eine Zeile der Form entstanden ist, wo λ ≠ 0 ... Sie sollten sofort antworten, dass das System inkompatibel ist.
Wenn ein lineares Gleichungssystem keine Lösungen hat, ist dies fast ein Geschenk für den Schüler, da eine kurze Lösung erhalten wird, manchmal buchstäblich in 2-3 Schritten. Aber alles in dieser Welt ist ausgewogen, und die Aufgabe, bei der das System unendlich viele Lösungen hat, ist einfach länger.
Beispiel 3:
Löse ein System linearer Gleichungen

Es gibt 4 Gleichungen und 4 Unbekannte, sodass das System entweder eine einzelne Lösung oder keine Lösungen oder unendlich viele Lösungen haben kann. Wie dem auch sei, aber die Gauss-Methode wird uns trotzdem zur Antwort führen. Das ist seine Vielseitigkeit.
Der Anfang ist wieder Standard. Schreiben wir die erweiterte Matrix des Systems auf und bringen sie mit elementaren Transformationen in eine schrittweise Form:

Das ist alles, und Sie hatten Angst.
(1). Bitte beachten Sie, dass alle Zahlen in der ersten Spalte durch 2 teilbar sind, sodass wir uns mit den beiden im oberen linken Schritt zufrieden geben. Zur zweiten Zeile addieren Sie die erste Zeile multipliziert mit (–4). Addiere zur dritten Zeile die erste Zeile multipliziert mit (–2). Fügen Sie zur vierten Zeile die erste Zeile multipliziert mit (–1) hinzu.
Beachtung! Viele mögen von der vierten Zeile versucht werden subtrahieren erste Linie. Dies ist möglich, aber nicht notwendig, die Erfahrung zeigt, dass die Wahrscheinlichkeit eines Berechnungsfehlers um ein Vielfaches steigt. Fügen Sie einfach hinzu: Fügen Sie zur vierten Zeile die erste Zeile multipliziert mit (-1) hinzu - genau so!
(2). Die letzten drei Zeilen sind proportional, zwei davon können gelöscht werden. Hier musst du wieder zeigen erhöhte Aufmerksamkeit, aber sind die Linien wirklich proportional? Um auf der sicheren Seite zu sein, wird es nicht überflüssig sein, die zweite Zeile mit (-1) zu multiplizieren und die vierte Zeile durch 2 zu dividieren, was drei identische Zeilen ergibt. Und erst dann zwei davon löschen. Durch elementare Transformationen wird die erweiterte Matrix des Systems auf eine Stufenform reduziert:

Beim Ausfüllen einer Aufgabe in einem Notizbuch empfiehlt es sich, die gleichen Notizen aus Gründen der Übersichtlichkeit mit Bleistift zu machen.
Schreiben wir das entsprechende Gleichungssystem um: 
Die einzige Lösung des Systems riecht hier nicht nach "üblich". Eine schlechte Linie, wo λ ≠ 0, auch nicht. Dies bedeutet, dass dies der dritte verbleibende Fall ist – das System hat unendlich viele Lösungen.
Unendlich viele Systemlösungen werden kurz in Form der sogenannten Gesamtsystemlösung.
Wir finden die allgemeine Lösung des Systems mit dem umgekehrten Zug des Gauß-Verfahrens. Für Gleichungssysteme mit unendlich vielen Lösungen erscheinen neue Konzepte: "Basisvariablen" und "Freie Variablen"... Zuerst definieren wir, welche Variablen wir haben Basic, und welche Variablen - kostenlos... Es ist nicht notwendig, die Begriffe der linearen Algebra im Detail zu erklären, es reicht aus, sich daran zu erinnern, dass es solche gibt Basisvariablen und freie Variablen.
Basisvariablen "sitzen" immer streng auf den Stufen der Matrix... In diesem Beispiel sind die Basisvariablen x 1 und x 3 .
Freie Variablen sind alles verblieben Variablen, die keinen Strompfad erhalten haben. In unserem Fall gibt es zwei davon: x 2 und x 4 - freie Variablen.
Jetzt brauchst du alleBasisvariablen ausdrücken nur durchfreie Variablen... Die Umkehrung des Gaußschen Algorithmus arbeitet traditionell von unten nach oben. Aus der zweiten Gleichung des Systems drücken wir die Grundvariable x 3:
Schauen wir uns nun die erste Gleichung an: ![]() ... Zuerst setzen wir den gefundenen Ausdruck ein:
... Zuerst setzen wir den gefundenen Ausdruck ein:
![]()
Es bleibt noch die Basisvariable auszudrücken x 1 über freie Variablen x 2 und x 4:

Am Ende haben wir bekommen, was wir brauchen - alle Basisvariablen ( x 1 und x 3) ausgedrückt nur durch freie Variablen ( x 2 und x 4):
![]()
Eigentlich ist die allgemeine Lösung fertig:
![]() .
.
Wie schreibt man die allgemeine Lösung richtig auf? Zunächst werden freie Variablen "von selbst" und streng an deren Stelle in die allgemeine Lösung geschrieben. In diesem Fall freie Variablen x 2 und x 4 sollte an der zweiten und vierten Stelle geschrieben werden:
 .
.
Die erhaltenen Ausdrücke für die Basisvariablen ![]() und natürlich müssen Sie an der ersten und dritten Position schreiben:
und natürlich müssen Sie an der ersten und dritten Position schreiben:

Aus der allgemeinen Lösung des Systems können Sie unendlich viele finden private Lösungen... Es ist sehr einfach. Kostenlose Variablen x 2 und x 4 werden so genannt, weil sie gegeben werden können beliebige Endwerte... Die beliebtesten Werte sind Null, da dies der einfachste Weg ist, die jeweilige Lösung zu erhalten.
Ersetzen ( x 2 = 0; x 4 = 0) in die allgemeine Lösung ein, erhalten wir eine der einzelnen Lösungen:
![]() , oder ist eine bestimmte Lösung, die freien Variablen bei Werten entspricht ( x 2 = 0; x 4 = 0).
, oder ist eine bestimmte Lösung, die freien Variablen bei Werten entspricht ( x 2 = 0; x 4 = 0).
Einheiten sind ein weiteres süßes Paar, Ersatz ( x 2 = 1 und x 4 = 1) in eine allgemeine Lösung:
![]() , d. h. (-1; 1; 1; 1) ist eine weitere besondere Lösung.
, d. h. (-1; 1; 1; 1) ist eine weitere besondere Lösung.
Es ist leicht zu sehen, dass das Gleichungssystem unendlich viele Lösungen, da wir freie Variablen angeben können irgendein Werte.
Jeder die spezielle Lösung muss erfüllen zu jedem Gleichung des Systems. Dies ist die Grundlage für die "schnelle" Überprüfung der Richtigkeit der Lösung. Nehmen Sie zum Beispiel eine bestimmte Lösung (-1; 1; 1; 1) und setzen Sie sie in die linke Seite jeder Gleichung des ursprünglichen Systems ein:
Alles sollte zusammenpassen. Und bei jeder bestimmten Entscheidung, die Sie erhalten, sollte auch alles stimmen.
Streng genommen täuscht die Überprüfung einer bestimmten Lösung manchmal, d.h. eine bestimmte Lösung kann jede Gleichung des Systems erfüllen, aber die allgemeine Lösung selbst wird tatsächlich falsch gefunden. Daher ist die Überprüfung der allgemeinen Lösung zunächst gründlicher und zuverlässiger.
So überprüfen Sie die resultierende allgemeine Lösung ![]() ?
?
Es ist nicht schwierig, aber es erfordert viele zeitaufwändige Transformationen. Du musst Ausdrücke nehmen Basic Variablen, in diesem Fall ![]() und, und setze sie in die linke Seite jeder Gleichung des Systems ein.
und, und setze sie in die linke Seite jeder Gleichung des Systems ein.
Auf der linken Seite der ersten Gleichung des Systems:

Die rechte Seite der anfänglichen ersten Gleichung des Systems wird erhalten.
Auf der linken Seite der zweiten Gleichung des Systems:

Die rechte Seite der ursprünglichen zweiten Gleichung des Systems wird erhalten.
Und weiter - auf der linken Seite der dritten und vierten Gleichung des Systems. Diese Prüfung dauert zwar länger, garantiert aber die hundertprozentige Korrektheit der Gesamtlösung. Darüber hinaus ist bei manchen Aufgabenstellungen gerade die Verifizierung der Gesamtlösung erforderlich.
Beispiel 4:
Lösen Sie das System mit der Gaußschen Methode. Finden Sie eine allgemeine Lösung und zwei besondere. Überprüfen Sie die allgemeine Lösung.

Dies ist ein Beispiel für eine Do-it-yourself-Lösung. Auch hier ist übrigens die Anzahl der Gleichungen kleiner als die Anzahl der Unbekannten, was bedeutet, dass sofort klar ist, dass das System entweder inkompatibel oder mit einer unendlichen Menge von Lösungen ist.
Beispiel 5:
Löse ein lineares Gleichungssystem. Wenn das System unendlich viele Lösungen hat, finde zwei spezielle Lösungen und überprüfe die allgemeine Lösung

Lösung: Schreiben wir die erweiterte Matrix des Systems auf und bringen sie mit elementaren Transformationen in eine schrittweise Form:

(1). Fügen Sie die erste Zeile in die zweite Zeile ein. Zur dritten Zeile addieren wir die erste Zeile multipliziert mit 2. Zur vierten Zeile addieren wir die erste Zeile multipliziert mit 3.
(2). Fügen Sie zur dritten Zeile die zweite Zeile multipliziert mit (–5) hinzu. Addiere zur vierten Zeile die zweite Zeile multipliziert mit (–7).
(3). Die dritte und vierte Zeile sind gleich, wir löschen eine davon. Hier ist solche Schönheit:

Basisvariablen sitzen auf Sprossen, also Basisvariablen.
Es gibt nur eine freie Variable, die hier keinen Schritt bekommen hat:.
(4). Rückwärtsgang. Lassen Sie uns die Basisvariablen in Form einer freien Variablen ausdrücken:
Aus der dritten Gleichung:
![]()
Betrachten Sie die zweite Gleichung und setzen Sie den gefundenen Ausdruck ein:
![]() ,
, ![]() , ,
, ,
Betrachten Sie die erste Gleichung und setzen Sie die gefundenen Ausdrücke ein:

Damit ist die allgemeine Lösung für eine freie Variable x 4:
![]()
Wie kam es noch einmal dazu? Freie Variable x 4 sitzt allein auf seinem rechtmäßigen vierten Platz. Die resultierenden Ausdrücke für die Basisvariablen stehen ebenfalls an ihrer Stelle.
Lassen Sie uns gleich die allgemeine Lösung überprüfen.
Wir setzen die Basisvariablen in die linke Seite jeder Gleichung des Systems ein:




Die entsprechenden rechten Seiten der Gleichungen werden erhalten und somit die richtige allgemeine Lösung gefunden.
Nun aus der gefundenen gemeinsamen Lösung ![]() wir erhalten zwei besondere Lösungen. Alle Variablen werden hier durch ein einzelnes . ausgedrückt freie Variable x 4. Du musst dir nicht den Kopf brechen.
wir erhalten zwei besondere Lösungen. Alle Variablen werden hier durch ein einzelnes . ausgedrückt freie Variable x 4. Du musst dir nicht den Kopf brechen.
Lassen x 4 = 0, dann ![]() - die erste besondere Lösung.
- die erste besondere Lösung.
Lassen x 4 = 1, dann ![]() - noch eine besondere Lösung.
- noch eine besondere Lösung.
Antworten: Gemeinsame Entscheidung: ![]() ... Private Lösungen:
... Private Lösungen:
![]() und .
und .
Beispiel 6:
Finden Sie die allgemeine Lösung eines linearen Gleichungssystems.

Wir haben die allgemeine Entscheidung bereits geprüft, der Antwort kann man vertrauen. Ihr Entscheidungsweg kann von unserem Entscheidungsweg abweichen. Hauptsache, gemeinsame Entscheidungen fallen zusammen. Wahrscheinlich haben viele Leute bei den Lösungen einen unangenehmen Moment bemerkt: Sehr oft mussten wir im umgekehrten Verlauf der Gauß-Methode mit gewöhnlichen Brüchen herumfummeln. In der Praxis trifft dies zu, Fälle, in denen es keine Brüche gibt, sind viel seltener. Seien Sie mental und vor allem technisch vorbereitet.
Lassen Sie uns auf die Merkmale der Lösung eingehen, die in den gelösten Beispielen nicht gefunden wurden. Die allgemeine Lösung des Systems kann manchmal eine Konstante (oder Konstanten) enthalten.
Die allgemeine Lösung lautet beispielsweise:. Hier ist eine der Basisvariablen gleich einer konstanten Zahl:. Daran ist nichts Exotisches, es passiert. Offensichtlich enthält in diesem Fall jede bestimmte Lösung ein A an der ersten Stelle.
Selten, aber es gibt Systeme, in denen die Anzahl der Gleichungen ist größer als die Anzahl der Variablen... Die Gauss-Methode funktioniert jedoch unter härtesten Bedingungen. Es ist notwendig, die erweiterte Matrix des Systems gemäß dem Standardalgorithmus in Ruhe auf eine gestufte Form zu reduzieren. Ein solches System kann inkonsistent sein, es kann unendlich viele Lösungen haben, und seltsamerweise kann es eine einzige Lösung haben.
Wiederholen wir unseren Rat - um sich beim Lösen eines Systems mit der Gaußschen Methode wohl zu fühlen, sollten Sie Ihre Hand füllen und mindestens ein Dutzend Systeme lösen.
Lösungen und Antworten:
Beispiel 2:
Lösung:Schreiben wir die erweiterte Matrix des Systems auf und bringen sie mit elementaren Transformationen in eine schrittweise Form.
Elementare Transformationen durchgeführt:
(1) Die erste und dritte Zeile sind vertauscht.
(2) Die erste Zeile multipliziert mit (–6) wurde zur zweiten Zeile addiert. Die erste Zeile multipliziert mit (–7) wurde zur dritten Zeile addiert.
(3) Die zweite Zeile multipliziert mit (-1) wurde zur dritten Zeile addiert.
Als Ergebnis elementarer Transformationen entsteht ein String der Form, wo λ ≠ 0 .Dies bedeutet, dass das System nicht kompatibel ist.Antworten: keine Lösungen.
Beispiel 4:
Lösung:Schreiben wir die erweiterte Matrix des Systems auf und bringen sie mit elementaren Transformationen in eine schrittweise Form:

Durchgeführte Konvertierungen:
(1). Die erste Zeile multipliziert mit 2 wurde zur zweiten Zeile addiert, die erste Zeile multipliziert mit 3 wurde zur dritten Zeile addiert.
Es gibt niemanden für den zweiten Schritt , und Transformation (2) zielt darauf ab, sie zu erhalten.
(2). Die dritte Zeile wurde zur zweiten Zeile multipliziert mit –3 addiert.
(3). Die zweite und dritte Zeile wurden vertauscht (das resultierende -1 wurde zum zweiten Schritt neu angeordnet)
(4). Die dritte Zeile wurde zur zweiten Zeile multipliziert mit 3 addiert.
(5). Das Vorzeichen der ersten beiden Zeilen wurde geändert (multipliziert mit –1), die dritte Zeile wurde durch 14 geteilt.
Umkehren:
(1). Hier - Basisvariablen (die sich auf den Stufen befinden) und - freie Variablen (die keinen Schritt bekommen haben).
(2). Lassen Sie uns die grundlegenden Variablen in Form von freien Variablen ausdrücken:
Aus der dritten Gleichung: .
(3). Betrachten Sie die zweite Gleichung:, besondere Lösungen:
Antworten: Gemeinsame Entscheidung: ![]()
Komplexe Zahlen
In diesem Abschnitt werden wir uns mit dem Konzept vertraut machen komplexe Zahl, Erwägen algebraisch, trigonometrisch und beispielhafte Form komplexe Zahl. Wir werden auch lernen, wie man Aktionen mit komplexen Zahlen durchführt: Addition, Subtraktion, Multiplikation, Division, Exponentiation und Wurzelextraktion.
Um komplexe Zahlen zu beherrschen, braucht man keine besonderen Kenntnisse aus dem Studium der höheren Mathematik und der Stoff steht sogar einem Studenten zur Verfügung. Es reicht aus, algebraische Operationen mit "gewöhnlichen" Zahlen durchzuführen und sich an die Trigonometrie zu erinnern.
Erinnern wir uns zunächst an die „gewöhnlichen“ Zahlen. In der Mathematik heißen sie Menge reeller Zahlen und bezeichnet mit dem Buchstaben R, oder R (verdickt). Alle reellen Zahlen sitzen auf dem bekannten Zahlenstrahl:

Die Gesellschaft der reellen Zahlen ist sehr vielfältig - hier gibt es ganze Zahlen, Brüche und irrationale Zahlen. In diesem Fall entspricht jeder Punkt der numerischen Achse notwendigerweise einer reellen Zahl.
Gleichungssysteme werden in der Wirtschaftsindustrie häufig bei der mathematischen Modellierung verschiedener Prozesse verwendet. Zum Beispiel bei der Lösung von Management- und Planungsproblemen von Produktion, Logistikrouten (Transportproblem) oder Geräteplatzierung.
Gleichungssysteme werden nicht nur in der Mathematik, sondern auch in der Physik, Chemie und Biologie verwendet, um Probleme bei der Bestimmung der Bevölkerungsgröße zu lösen.
Ein lineares Gleichungssystem nennt man zwei oder mehr Gleichungen mit mehreren Variablen, für die eine allgemeine Lösung gefunden werden muss. Eine solche Zahlenfolge, für die alle Gleichungen zu wahren Gleichheiten werden oder beweisen, dass die Folge nicht existiert.
Lineargleichung
Gleichungen der Form ax + by = c heißen linear. Die Notation x, y ist die Unbekannte, deren Wert gefunden werden muss, b, a sind die Koeffizienten der Variablen, c ist der freie Term der Gleichung.
Die Lösung der Gleichung durch Zeichnen ihres Graphen hat die Form einer geraden Linie, deren alle Punkte die Lösung des Polynoms sind.
Arten von linearen Gleichungssystemen
Als einfachste Beispiele gelten lineare Gleichungssysteme mit zwei Variablen X und Y.
F1 (x, y) = 0 und F2 (x, y) = 0, wobei F1,2 Funktionen und (x, y) Funktionsvariablen sind.
Gleichungssystem lösen - es bedeutet, solche Werte (x, y) zu finden, bei denen das System zu einer echten Gleichheit wird, oder festzustellen, dass es keine geeigneten Werte für x und y gibt.
Ein Wertepaar (x, y), das als Koordinaten eines Punktes geschrieben wird, wird als Lösung eines linearen Gleichungssystems bezeichnet.
Wenn die Systeme eine gemeinsame Lösung haben oder die Lösung nicht existiert, werden sie als äquivalent bezeichnet.
Homogene lineare Gleichungssysteme sind Systeme, deren rechte Seite gleich Null ist. Wenn der rechte Teil nach dem Gleichheitszeichen einen Wert hat oder durch eine Funktion ausgedrückt wird, ist ein solches System heterogen.
Die Anzahl der Variablen kann viel mehr als zwei betragen, dann sollten wir über ein Beispiel für ein lineares Gleichungssystem mit drei oder mehr Variablen sprechen.
Schulkinder gehen bei Systemen davon aus, dass die Zahl der Gleichungen zwangsläufig mit der Zahl der Unbekannten übereinstimmen muss, aber das ist nicht der Fall. Die Anzahl der Gleichungen im System hängt nicht von Variablen ab, es können beliebig viele sein.
Einfache und komplexe Methoden zum Lösen von Gleichungssystemen
Es gibt keinen allgemeinen analytischen Weg, solche Systeme zu lösen, alle Methoden basieren auf numerischen Lösungen. Der Schulmathematikkurs beschreibt ausführlich Methoden wie Permutation, algebraische Addition, Substitution, sowie die Graphik- und Matrixmethode, die Lösung nach der Gauß-Methode.
Die Hauptaufgabe beim Unterrichten von Lösungsmethoden besteht darin, das System richtig zu analysieren und den optimalen Lösungsalgorithmus für jedes Beispiel zu finden. Die Hauptsache ist nicht, sich das System von Regeln und Aktionen für jede Methode zu merken, sondern die Prinzipien der Anwendung einer bestimmten Methode zu verstehen
Die Lösung von Beispielen von linearen Gleichungssystemen der 7. Klasse des allgemeinbildenden Lehrplans ist recht einfach und sehr ausführlich erklärt. In jedem Lehrbuch der Mathematik wird diesem Abschnitt genügend Aufmerksamkeit geschenkt. Die Lösung von Beispielen von linearen Gleichungssystemen nach der Methode von Gauß und Cramer wird in den ersten Studienjahren an Hochschulen genauer untersucht.
Lösung von Systemen durch Substitutionsmethode
Die Aktionen der Substitutionsmethode zielen darauf ab, den Wert einer Variablen durch die zweite auszudrücken. Der Ausdruck wird in die verbleibende Gleichung eingesetzt und dann auf eine Form mit einer Variablen reduziert. Die Aktion wird je nach Anzahl der Unbekannten im System wiederholt
Geben wir die Lösung eines Beispiels eines linearen Gleichungssystems der 7. Klasse durch die Substitutionsmethode:

Wie Sie aus dem Beispiel sehen können, wurde die Variable x durch F (X) = 7 + Y ausgedrückt. Der resultierende Ausdruck, der anstelle von X in die 2. Gleichung des Systems eingesetzt wurde, half dabei, eine Variable Y in der 2. Gleichung zu erhalten . Die Lösung dieses Beispiels bereitet keine Schwierigkeiten und ermöglicht es Ihnen, den Y-Wert zu erhalten.Der letzte Schritt besteht darin, die erhaltenen Werte zu überprüfen.
Es ist nicht immer möglich, ein Beispiel für ein lineares Gleichungssystem durch Substitution zu lösen. Die Gleichungen können komplex sein und der Ausdruck der Variablen durch die zweite Unbekannte wird für weitere Berechnungen zu umständlich. Bei mehr als 3 Unbekannten im System ist die Lösung durch Substitution ebenfalls unpraktisch.
Lösung eines Beispiels eines Systems linearer inhomogener Gleichungen:

Algebraische Additionslösung
Bei der Suche nach einer Lösung von Systemen durch das Additionsverfahren werden eine Term-für-Term-Addition und eine Multiplikation von Gleichungen mit verschiedenen Zahlen durchgeführt. Das ultimative Ziel mathematischer Operationen ist eine Gleichung in einer Variablen.

Diese Methode erfordert Übung und Beobachtung. Es ist nicht einfach, ein lineares Gleichungssystem nach der Additionsmethode mit einer Variablenanzahl von 3 oder mehr zu lösen. Es ist praktisch, die algebraische Addition zu verwenden, wenn Brüche und Dezimalzahlen in den Gleichungen vorhanden sind.
Lösungsaktionsalgorithmus:
- Multiplizieren Sie beide Seiten der Gleichung mit einer Zahl. Als Ergebnis der arithmetischen Operation muss einer der Koeffizienten der Variablen gleich 1 werden.
- Fügen Sie den resultierenden Ausdruck Begriff für Begriff hinzu und suchen Sie eine der Unbekannten.
- Setzen Sie den erhaltenen Wert in die 2. Gleichung des Systems ein, um die verbleibende Variable zu finden.
Lösung durch Einführung einer neuen Variablen
Eine neue Variable kann eingeführt werden, wenn das System eine Lösung für nicht mehr als zwei Gleichungen finden muss, die Anzahl der Unbekannten sollte ebenfalls nicht mehr als zwei betragen.
Die Methode wird verwendet, um eine der Gleichungen durch Eingabe einer neuen Variablen zu vereinfachen. Die neue Gleichung wird in Bezug auf die eingegebene Unbekannte gelöst und der resultierende Wert wird verwendet, um die ursprüngliche Variable zu bestimmen.
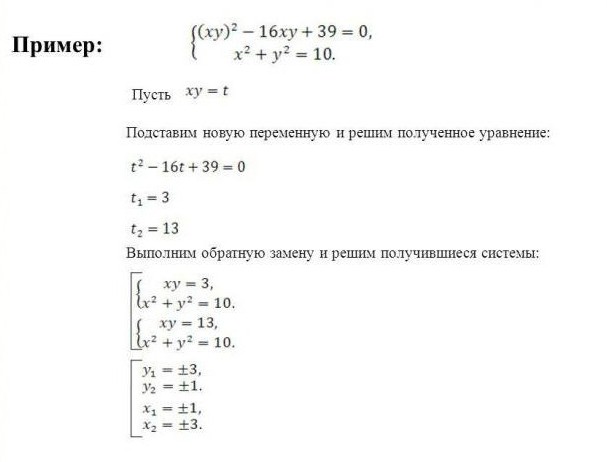
Das Beispiel zeigt, dass es durch die Einführung einer neuen Variablen t möglich war, die 1. Gleichung des Systems auf ein quadratisches Standardtrinom zu reduzieren. Sie können das Polynom lösen, indem Sie die Diskriminante bestimmen.
Es ist notwendig, den Wert der Diskriminante nach der bekannten Formel zu finden: D = b2 - 4 * a * c, wobei D die gesuchte Diskriminante ist, b, a, c die Faktoren des Polynoms sind. Im gegebenen Beispiel ist a = 1, b = 16, c = 39, also D = 100. Wenn die Diskriminante größer als Null ist, dann gibt es zwei Lösungen: t = -b ± √D / 2 * a, wenn die Diskriminante kleiner als Null ist, dann gibt es eine Lösung: x = -b / 2 * a.
Die Lösung für die resultierenden Systeme wird durch die Additionsmethode gefunden.
Visuelle Methode zum Lösen von Systemen
Geeignet für Systeme mit 3 Gleichungen. Das Verfahren besteht darin, auf der Koordinatenachse der Graphen jeder im System enthaltenen Gleichung zu zeichnen. Die Koordinaten der Schnittpunkte der Kurven sind die allgemeine Lösung des Systems.
Die grafische Methode hat eine Reihe von Nuancen. Betrachten wir einige Beispiele für die visuelle Lösung von linearen Gleichungssystemen.

Wie man am Beispiel sehen kann, wurden für jede Gerade zwei Punkte gebildet, die Werte der Variablen x wurden willkürlich gewählt: 0 und 3. Anhand der Werte von x wurden die Werte für y gefunden : 3 und 0. Punkte mit Koordinaten (0, 3) und (3, 0) wurden auf der Grafik markiert und mit einer Linie verbunden.
Die Schritte müssen für die zweite Gleichung wiederholt werden. Der Schnittpunkt der Geraden ist die Lösung des Systems.
Im folgenden Beispiel müssen Sie eine grafische Lösung für ein lineares Gleichungssystem finden: 0,5x-y + 2 = 0 und 0,5x-y-1 = 0.

Wie Sie am Beispiel sehen können, hat das System keine Lösung, da die Graphen parallel sind und sich nicht über ihre gesamte Länge schneiden.

Die Systeme aus den Beispielen 2 und 3 sind ähnlich, aber beim Bau wird deutlich, dass ihre Lösungen unterschiedlich sind. Es sei daran erinnert, dass es nicht immer möglich ist zu sagen, ob ein System eine Lösung hat oder nicht, es ist immer notwendig, einen Graphen zu erstellen.
Die Matrix und ihre Varianten
Matrizen werden verwendet, um ein System linearer Gleichungen prägnant zu schreiben. Eine Matrix ist eine mit Zahlen gefüllte Tabelle besonderer Art. n * m hat n - Zeilen und m - Spalten.
Eine Matrix ist quadratisch, wenn die Anzahl der Spalten und Zeilen gleich ist. Eine Vektormatrix ist eine einspaltige Matrix mit unendlich vielen Zeilen. Eine Matrix mit Einsen entlang einer der Diagonalen und anderen Nullelementen wird als Identitätsmatrix bezeichnet.
Eine inverse Matrix ist eine solche Matrix, mit der die ursprüngliche Matrix in eine Identitätsmatrix multipliziert wird, eine solche Matrix existiert nur für die ursprüngliche quadratische Matrix.
Regeln zur Transformation eines Gleichungssystems in eine Matrix
Bei Gleichungssystemen werden die Koeffizienten und freien Terme der Gleichungen als Zahlen der Matrix geschrieben, eine Gleichung ist eine Zeile der Matrix.
Eine Matrixzeile heißt ungleich null, wenn mindestens ein Element der Zeile ungleich null ist. Wenn sich in einer der Gleichungen die Anzahl der Variablen unterscheidet, ist es daher erforderlich, Null anstelle der fehlenden Unbekannten zu schreiben.
Die Spalten der Matrix müssen genau mit den Variablen übereinstimmen. Dies bedeutet, dass die Koeffizienten der Variablen x nur in eine Spalte geschrieben werden können, beispielsweise die erste, der Koeffizient der Unbekannten y - nur in die zweite.
Beim Multiplizieren einer Matrix werden alle Elemente der Matrix nacheinander mit einer Zahl multipliziert.
Varianten zum Finden der inversen Matrix
Die Formel zum Finden der inversen Matrix ist ganz einfach: K -1 = 1 / |K |, wobei K -1 die inverse Matrix ist und |K | ist die Determinante der Matrix. | K | sollte nicht null sein, dann hat das System eine Lösung.
Die Determinante lässt sich für eine Zwei-mal-Zwei-Matrix leicht berechnen, Sie müssen nur die Elemente auf der Diagonalen miteinander multiplizieren. Für die Option "drei mal drei" gibt es die Formel | K | = a 1 b 2 c 3 + a 1 b 3 c 2 + a 3 b 1 c 2 + a 2 b 3 c 1 + a 2 b 1 c 3 + a 3 b 2 c 1. Sie können die Formel verwenden oder sich daran erinnern, dass Sie aus jeder Zeile und jeder Spalte ein Element nehmen müssen, damit sich die Anzahl der Spalten und Elementreihen im Produkt nicht wiederholt.
Lösung von Beispielen von linearen Gleichungssystemen nach der Matrixmethode
Die Matrixmethode zum Finden einer Lösung ermöglicht es, umständliche Aufzeichnungen beim Lösen von Systemen mit einer großen Anzahl von Variablen und Gleichungen zu reduzieren.

Im Beispiel sind a nm die Koeffizienten der Gleichungen, die Matrix ist ein Vektor, x n sind Variablen und b n sind freie Terme.


Gaußsche Lösung von Systemen
In der höheren Mathematik wird die Gauß-Methode zusammen mit der Cramer-Methode untersucht, und der Prozess der Lösungsfindung für Systeme wird als Gauß-Cramer-Methode bezeichnet. Diese Methoden werden verwendet, um variable Systeme mit einer großen Anzahl von linearen Gleichungen zu finden.
Die Methode von Gauß ist der Substitutions- und algebraischen Additionslösung sehr ähnlich, jedoch systematischer. Im Schulkurs wird die Gaußsche Lösung für Systeme aus 3 und 4 Gleichungen verwendet. Das Ziel des Verfahrens besteht darin, das System wie ein umgekehrtes Trapez aussehen zu lassen. Der Wert einer Variablen in einer der Gleichungen des Systems wird durch algebraische Transformationen und Substitutionen gefunden. Die zweite Gleichung ist ein Ausdruck mit 2 Unbekannten, aber 3 und 4 - bzw. mit 3 und 4 Variablen.
Nachdem das System in die beschriebene Form gebracht wurde, reduziert sich die weitere Lösung auf die sequentielle Einsetzung bekannter Variablen in die Gleichungen des Systems.
In Schulbüchern der 7. Klasse wird ein Lösungsbeispiel nach der Gauß-Methode wie folgt beschrieben:

Wie Sie dem Beispiel entnehmen können, wurden in Schritt (3) zwei Gleichungen erhalten: 3x 3 -2x 4 = 11 und 3x 3 + 2x 4 = 7. Die Lösung einer der Gleichungen ermöglicht es Ihnen, eine der Variablen x n herauszufinden.

Der im Text erwähnte Satz 5 besagt, dass, wenn eine der Gleichungen des Systems durch eine äquivalente ersetzt wird, das resultierende System auch dem ursprünglichen äquivalent ist.
Die Gauss-Methode ist für Gymnasiasten schwer zu verstehen, aber sie ist eine der interessantesten Möglichkeiten, die Intelligenz von Kindern im fortgeschrittenen Mathematik- und Physikunterricht zu entwickeln.
Um die Berechnungen zu vereinfachen, ist es üblich, Folgendes zu tun:

Die Koeffizienten der Gleichungen und freien Terme werden in Form einer Matrix geschrieben, wobei jede Zeile der Matrix mit einer der Gleichungen des Systems in Beziehung steht. trennt die linke Seite der Gleichung von der rechten Seite. Römische Ziffern geben die Nummern der Gleichungen im System an.
Zuerst schreiben sie die Matrix auf, mit der sie arbeiten möchten, dann alle Aktionen, die mit einer der Zeilen ausgeführt wurden. Die resultierende Matrix wird nach dem Pfeilzeichen geschrieben und die notwendigen algebraischen Aktionen werden fortgesetzt, bis das Ergebnis erreicht ist.
Als Ergebnis sollte eine Matrix erhalten werden, in der eine der Diagonalen 1 ist und alle anderen Koeffizienten gleich Null sind, dh die Matrix wird in eine einzige Form gebracht. Vergessen Sie nicht, Berechnungen mit den Zahlen auf beiden Seiten der Gleichung durchzuführen.
Diese Schreibmethode ist weniger umständlich und ermöglicht es Ihnen, sich nicht von der Aufzählung zahlreicher Unbekannter ablenken zu lassen.
Die kostenlose Anwendung jeder Lösung erfordert Sorgfalt und ein gewisses Maß an Erfahrung. Nicht alle Methoden sind angewandter Natur. Einige Wege, Lösungen zu finden, sind in einem bestimmten Bereich der menschlichen Tätigkeit vorzuziehen, während andere für Bildungszwecke existieren.
Ein System linearer Agebraic-Gleichungen (SLAE) auf Kompatibilität zu untersuchen, bedeutet herauszufinden, ob dieses System Lösungen hat oder nicht. Nun, wenn es Lösungen gibt, geben Sie an, wie viele davon.
Wir benötigen Informationen aus dem Thema "System linearer algebraischer Gleichungen. Grundbegriffe. Matrixnotation". Insbesondere werden Konzepte wie die Matrix des Systems und die erweiterte Matrix des Systems benötigt, da auf ihnen die Formulierung des Kronecker-Capelli-Theorems basiert. Wie üblich wird die Matrix des Systems mit dem Buchstaben $ A $ und die erweiterte Matrix des Systems mit dem Buchstaben $ \ widetilde (A) $ bezeichnet.
Satz von Kronecker-Capelli
Das System linearer algebraischer Gleichungen ist genau dann konsistent, wenn der Rang der Matrix des Systems gleich dem Rang der erweiterten Matrix des Systems ist, d.h. $ \ rang A = \ rang \ widetilde (A) $.
Lassen Sie mich daran erinnern, dass ein System als Gelenk bezeichnet wird, wenn es mindestens eine Lösung hat. Der Satz von Kronecker-Capelli besagt Folgendes: Wenn $ \ rang A = \ rang \ widetilde (A) $ ist, dann gibt es eine Lösung; wenn $ \ rang A \ neq \ rang \ widetilde (A) $, dann hat diese SLAE keine Lösungen (inkonsistent). Die Antwort auf die Frage nach der Anzahl dieser Lösungen wird durch ein Korollar zum Satz von Kronecker-Capelli gegeben. Bei der Formulierung des Korollars wird der Buchstabe $ n $ verwendet, der der Anzahl der Variablen des gegebenen SLAE entspricht.
Folgerung aus dem Kronecker-Capelli-Theorem
- Wenn $ \ rang A \ neq \ rang \ widetilde (A) $ ist, dann ist die SLAE inkonsistent (hat keine Lösungen).
- Wenn $ \ rang A = \ rang \ widetilde (A)< n$, то СЛАУ является неопределённой (имеет бесконечное количество решений).
- Wenn $ \ rang A = \ rang \ widetilde (A) = n $ ist, dann ist die SLAE definitiv (hat genau eine Lösung).
Beachten Sie, dass das obige Theorem und seine Folgerung nicht angeben, wie die Lösung des SLAE zu finden ist. Mit ihrer Hilfe können Sie nur herausfinden, ob es diese Lösungen gibt oder nicht, und wenn ja, wie viele.
Beispiel 1
SLAE erkunden $ \ links \ (\ Anfang (ausgerichtet) & -3x_1 + 9x_2-7x_3 = 17; \\ & -x_1 + 2x_2-4x_3 = 9; \\ & 4x_1-2x_2 + 19x_3 = -42. \ Ende (ausgerichtet ) \ richtig $ für Kompatibilität Wenn SLAE kompatibel ist, geben Sie die Anzahl der Lösungen an.
Um die Existenz von Lösungen zu einem gegebenen SLAE herauszufinden, verwenden wir den Satz von Kronecker-Capelli. Wir brauchen die Matrix des Systems $ A $ und die erweiterte Matrix des Systems $ \ widetilde (A) $, wir schreiben sie auf:
$$ A = \ left (\ begin (array) (ccc) -3 & 9 & -7 \\ -1 & 2 & -4 \\ 4 & -2 & 19 \ end (array) \ right); \; \ widetilde (A) = \ left (\ begin (array) (ccc | c) -3 & 9 & -7 & 17 \\ -1 & 2 & -4 & 9 \\ 4 & -2 & 19 & -42 \ end (array) \ right). $$
Finde $ \ rang A $ und $ \ rang \ widetilde (A) $. Dazu gibt es viele Möglichkeiten, von denen einige im Abschnitt Matrix-Rang aufgeführt sind. Üblicherweise werden zwei Methoden verwendet, um solche Systeme zu untersuchen: "Berechnung des Rangs einer Matrix per Definition" oder "Berechnung des Rangs einer Matrix nach der Methode der elementaren Transformationen".
Methodennummer 1. Berechnung der Ränge per Definition.
Der Rang ist definitionsgemäß die höchste Ordnung der Matrix-Minderjährigen, unter denen es mindestens eine Nicht-Null gibt. Normalerweise beginnt die Studie mit den Molls erster Ordnung, aber hier ist es bequemer, sofort mit der Berechnung des Molls dritter Ordnung der Matrix $ A $ zu beginnen. Die Elemente der Nebenstelle dritter Ordnung befinden sich am Schnittpunkt von drei Zeilen und drei Spalten der betrachteten Matrix. Da die Matrix $ A $ nur 3 Zeilen und 3 Spalten enthält, ist der Minor dritter Ordnung der Matrix $ A $ die Determinante der Matrix $ A $, d.h. $ \ Delta A $. Um die Determinante zu berechnen, wenden wir Formel #2 aus dem Thema "Formeln zur Berechnung von Determinanten zweiter und dritter Ordnung" an:
$$ \ Delta A = \ links | \ begin (array) (ccc) -3 & 9 & -7 \\ -1 & 2 & -4 \\ 4 & -2 & 19 \ end (array) \ right | = -21. $$
Es gibt also einen Minor dritter Ordnung der Matrix $ A $, der ungleich Null ist. Es ist unmöglich, ein Minor der vierten Ordnung zusammenzustellen, da es 4 Zeilen und 4 Spalten erfordert und in der $ A $ -Matrix nur 3 Zeilen und 3 Spalten vorhanden sind. Die höchste Ordnung der Minor der Matrix $ A $, unter denen es mindestens eine Nicht-Null gibt, ist also gleich 3. Daher ist $ \ rang A = 3 $.
Wir müssen auch $ \ rang \ widetilde (A) $ finden. Schauen wir uns die Struktur der Matrix $ \ widetilde (A) $ an. Die Matrix $ \ widetilde (A) $ enthält die Elemente der Matrix $ A $, und wir haben herausgefunden, dass $ \ Delta A \ neq 0 $ ist. Daher hat die Matrix $ \ widetilde (A) $ einen Minor dritter Ordnung, der nicht Null ist. Wir können die Nebenwerte vierter Ordnung der Matrix $ \ widetilde (A) $ nicht zusammensetzen, also schließen wir: $ \ rang \ widetilde (A) = 3 $.
Da $ \ rang A = \ rang \ widetilde (A) $ nach dem Satz von Kronecker-Capelli ist, ist das System konsistent, d.h. hat eine Lösung (mindestens eine). Um die Anzahl der Lösungen anzugeben, berücksichtigen wir, dass unser SLAE 3 Unbekannte enthält: $ x_1 $, $ x_2 $ und $ x_3 $. Da die Anzahl der Unbekannten $ n = 3 $ ist, schließen wir: $ \ rang A = \ rang \ widetilde (A) = n $, also ist das System nach dem Korollar aus dem Satz von Kronecker-Capelli definitiv, d. hat nur eine Lösung.
Das Problem ist gelöst worden. Was sind die Nachteile und Vorteile dieser Methode? Lassen Sie uns zunächst über die Profis sprechen. Zuerst mussten wir nur eine Determinante finden. Danach haben wir sofort eine Aussage über die Anzahl der Lösungen getroffen. Normalerweise werden in Standard-Standardrechnungen Gleichungssysteme angegeben, die drei Unbekannte enthalten und eine eindeutige Lösung haben. Für solche Systeme ist diese Methode sogar sehr praktisch, da wir im Voraus wissen, dass es eine Lösung gibt (sonst gäbe es in einer typischen Berechnung kein Beispiel). Jene. wir müssen nur die Existenz einer Lösung auf dem schnellsten Weg zeigen. Zweitens wird der berechnete Wert der Determinante der Matrix des Systems (d. h. $ \ Delta A $) nützlich sein nach: wenn wir beginnen, das gegebene System nach der Cramer-Methode oder unter Verwendung der inversen Matrix zu lösen.
Die Methode der Rangberechnung ist jedoch per Definition unerwünscht, wenn die Matrix des Systems $ A $ rechteckig ist. In diesem Fall ist es besser, die zweite Methode zu verwenden, die unten erörtert wird. Wenn $ \ Delta A = 0 $ ist, können wir außerdem nichts über die Anzahl der Lösungen einer gegebenen inhomogenen SLAE sagen. Vielleicht hat SLAE eine unendliche Anzahl von Lösungen oder vielleicht keine. Wenn $ \ Delta A = 0 $ ist, sind zusätzliche Recherchen erforderlich, die oft umständlich sind.
Zusammenfassend stelle ich fest, dass die erste Methode für SLAEs geeignet ist, bei denen die Matrix des Systems quadratisch ist. In diesem Fall enthält das SLAE selbst drei oder vier Unbekannte und wird aus typischen Standardberechnungen oder Kontrollarbeiten entnommen.
Methodennummer 2. Berechnung des Rangs nach der Methode der elementaren Transformationen.
Diese Methode wird im verwandten Thema ausführlich beschrieben. Wir berechnen den Rang der Matrix $ \ widetilde (A) $. Warum genau Matrizen $ \ widetilde (A) $ und nicht $ A $? Tatsache ist, dass die Matrix $ A $ ein Teil der Matrix $ \ widetilde (A) $ ist. Wenn wir also den Rang der Matrix $ \ widetilde (A) $ berechnen, finden wir gleichzeitig den Rang der Matrix $ A $.
\ begin (ausgerichtet) & \ widetilde (A) = \ left (\ begin (array) (ccc | c) -3 & 9 & -7 & 17 \\ -1 & 2 & -4 & 9 \\ 4 & - 2 & 19 & -42 \ end (array) \ right) \ rightarrow \ left | \ text (erste und zweite Zeile tauschen) \ right | \ rightarrow \\ & \ rightarrow \ left (\ begin (array) (ccc | c) -1 & 2 & -4 & 9 \\ -3 & 9 & -7 & 17 \\ 4 & -2 & 19 & - 42 \ end (array) \ right) \ begin (array) (l) \ phantom (0) \\ II-3 \ cdot I \\ III + 4 \ cdot I \ end (array) \ rightarrow \ left (\ begin (array) (ccc | c) -1 & 2 & -4 & 9 \\ 0 & 3 & 5 & -10 \\ 0 & 6 & 3 & -6 \ end (array) \ right) \ begin (array) ( l) \ phantom (0) \\ \ phantom (0) \\ III-2 \ cdot II \ end (array) \ rightarrow \\ & \ rightarrow \ left (\ begin (array) (ccc | c) -1 & 2 & -4 & 9 \\ 0 & 3 & 5 & -10 \\ 0 & 0 & -7 & 14 \ Ende (Array) \ rechts) \ Ende (ausgerichtet)
Wir haben die Matrix $ \ widetilde (A) $ auf eine Trapezform reduziert. Auf der Hauptdagonalen der resultierenden Matrix $ \ left (\ begin (array) (ccc | c) -1 & 2 & -4 & 9 \\ 0 & 3 & 5 & -10 \\ 0 & 0 & -7 & 14 \ end ( array) \ right) $ gibt es drei von Null verschiedene Elemente: -1, 3 und -7. Fazit: Der Rang der Matrix $ \ widetilde (A) $ ist 3, d.h. $ \ rang \ widetilde (A) = 3 $. Durch Transformationen mit den Elementen der Matrix $ \ widetilde (A) $ haben wir gleichzeitig die Elemente der Matrix $ A $ transformiert, die sich bis zur Zeile befinden. Matrix $ A $ ist auch trapezförmig: $ \ left (\ begin (array) (ccc) -1 & 2 & -4 \\ 0 & 3 & 5 \\ 0 & 0 & -7 \ end (array) \ right ) $. Fazit: Der Rang der Matrix $ A $ ist ebenfalls gleich 3, d.h. $ \ klingelte A = 3 $.
Da $ \ rang A = \ rang \ widetilde (A) $ nach dem Satz von Kronecker-Capelli ist, ist das System konsistent, d.h. hat eine Lösung. Um die Anzahl der Lösungen anzugeben, berücksichtigen wir, dass unser SLAE 3 Unbekannte enthält: $ x_1 $, $ x_2 $ und $ x_3 $. Da die Anzahl der Unbekannten $ n = 3 $ ist, schließen wir: $ \ rang A = \ rang \ widetilde (A) = n $, also nach dem Korollar aus dem Satz von Kronecker-Capelli ist das System definiert, d.h. hat nur eine Lösung.
Was sind die Vorteile der zweiten Methode? Der Hauptvorteil ist seine Vielseitigkeit. Es spielt für uns überhaupt keine Rolle, ob die Matrix des Systems quadratisch ist oder nicht. Außerdem haben wir tatsächlich Transformationen des Vorwärtsverlaufs der Gauß-Methode durchgeführt. Es bleiben nur noch ein paar Maßnahmen, und wir könnten die Lösung dieses SLAE finden. Ehrlich gesagt gefällt mir die zweite Methode besser als die erste, aber die Wahl ist Geschmackssache.
Antworten: Die angegebene SLAE ist konsistent und definiert.
Beispiel Nr. 2
SLAE erkunden $ \ left \ (\ begin (ausgerichtet) & x_1-x_2 + 2x_3 = -1; \\ & -x_1 + 2x_2-3x_3 = 3; \\ & 2x_1-x_2 + 3x_3 = 2; \\ & 3x_1- 2x_2 + 5x_3 = 1; \\ & 2x_1-3x_2 + 5x_3 = -4. \ Ende (bündig) \ rechts. $ Aus Kompatibilitätsgründen.
Wir finden die Ränge der Matrix des Systems und der erweiterten Matrix des Systems nach der Methode der elementaren Transformationen. Erweiterte Systemmatrix: $ \ widetilde (A) = \ left (\ begin (array) (ccc | c) 1 & -1 & 2 & -1 \\ -1 & 2 & -3 & 3 \\ 2 & -1 & 3 & 2 \\ 3 & -2 & 5 & 1 \\ 2 & -3 & 5 & -4 \ Ende (Array) \ rechts) $. Finden Sie die erforderlichen Ränge, indem Sie die erweiterte Matrix des Systems transformieren:

Die erweiterte Systemmatrix wird auf eine Stufenform reduziert. Wenn die Matrix auf eine gestufte Form reduziert wird, entspricht ihr Rang der Anzahl der Zeilen ungleich null. Daher klingelte $ \ A = 3 $. Die Matrix $ A $ (zur Gerade) wird auf eine Trapezform reduziert und ihr Rang ist 2, $ \ rang A = 2 $.

Da $ \ rang A \ neq \ rang \ widetilde (A) $ nach dem Satz von Kronecker-Capelli inkonsistent ist (d. h. keine Lösungen hat).
Antworten: Das System ist inkonsistent.
Beispiel Nr. 3
SLAE erkunden $ \ links \ (\ Anfang (ausgerichtet) & 2x_1 + 7x_3-5x_4 + 11x_5 = 42; \\ & x_1-2x_2 + 3x_3 + 2x_5 = 17; \\ & -3x_1 + 9x_2-11x_3-7x_5 = -64 ; \\ & -5x_1 + 17x_2-16x_3-5x_4-4x_5 = -90; \\ & 7x_1-17x_2 + 23x_3 + 15x_5 = 132. \ Ende (bündig) \ rechts. $ Aus Kompatibilitätsgründen.
Die erweiterte Systemmatrix lautet: $ \ widetilde (A) = \ left (\ begin (array) (ccccc | c) 2 & 0 & 7 & -5 & 11 & 42 \\ 1 & -2 & 3 & 0 & 2 & 17 \\ -3 & 9 & -11 & 0 & -7 & -64 \\ -5 & 17 & -16 & -5 & -4 & -90 \\ 7 & -17 & 23 & 0 & 15 & 132 \ end (array) \ right) $. Vertauschen wir die erste und zweite Zeile dieser Matrix, sodass das erste Element der ersten Zeile eins ist: $ \ left (\ begin (array) (ccccc | c) 1 & -2 & 3 & 0 & 2 & 17 \\ 2 & 0 & 7 & -5 & 11 & 42 \\ -3 & 9 & -11 & 0 & -7 & -64 \\ -5 & 17 & -16 & -5 & -4 & -90 \\ 7 & -17 & 23 & 0 & 15 & 132 \ Ende (Array) \ Rechts) $.

Wir haben die erweiterte Systemmatrix und die Systemmatrix selbst auf eine Trapezform reduziert. Der Rang der erweiterten Matrix des Systems ist drei, der Rang der Matrix des Systems ist ebenfalls drei. Da das System $ n = 5 $ Unbekannte enthält, d.h. $ \ rang \ widetilde (A) = \ rang A< n$, то согласно следствия из теоремы Кронекера-Капелли данная система является неопределённой, т.е. имеет бесконечное количество решений.
Antworten: Das System ist undefiniert.
Im zweiten Teil werden wir Beispiele analysieren, die oft in typischen Berechnungen oder Tests in der höheren Mathematik enthalten sind: eine Kompatibilitätsstudie und die Lösung eines SLAE, abhängig von den Werten der darin enthaltenen Parameter.
Beispiel 1... Finden Sie eine allgemeine Lösung und eine spezielle Lösung für das SystemLösung führen wir mit Hilfe eines Rechners durch. Schreiben wir die erweiterten und grundlegenden Matrizen auf: 
Die gepunktete Linie trennt die Hauptmatrix A. Oben schreiben wir die unbekannten Systeme, wobei wir die mögliche Neuordnung der Terme in den Gleichungen des Systems berücksichtigen. Wenn wir den Rang der erweiterten Matrix bestimmen, finden wir gleichzeitig den Rang und den Hauptrang. In Matrix B sind die erste und zweite Spalte proportional. Von den beiden proportionalen Spalten kann nur eine in das Basismoll fallen, daher übertragen wir beispielsweise die erste Spalte hinter die gestrichelte Linie mit dem umgekehrten Vorzeichen. Für das System bedeutet dies, die Terme von x 1 auf die rechte Seite der Gleichungen zu verschieben. 
Bringen wir die Matrix in eine Dreiecksform. Wir werden nur mit Zeilen arbeiten, da das Multiplizieren einer Zeile einer Matrix mit einer anderen Zahl als Null und das Addieren zu einer anderen Zeile für das System bedeutet, die Gleichung mit derselben Zahl zu multiplizieren und sie mit einer anderen Gleichung zu addieren, was die Lösung von . nicht ändert das System. Wir arbeiten mit der ersten Zeile: Multiplizieren Sie die erste Zeile der Matrix mit (-3) und addieren Sie der Reihe nach zur zweiten und dritten Zeile. Dann multiplizieren wir die erste Zeile mit (-2) und addieren zur vierten. 
Die zweite und dritte Zeile sind proportional, daher kann eine von ihnen, beispielsweise die zweite, durchgestrichen werden. Dies ist gleichbedeutend mit dem Streichen der zweiten Gleichung des Systems, da sie eine Folge der dritten ist. 
Jetzt arbeiten wir mit der zweiten Zeile: multiplizieren Sie sie mit (-1) und addieren Sie zur dritten. 
Das gestrichelte Minor hat die höchste Ordnung (der möglichen Minor) und ist ungleich Null (es ist gleich dem Produkt der Elemente auf der Hauptdiagonalen), und dieses Minor gehört sowohl zur Hauptmatrix als auch zur erweiterten Matrix, daher gilt rangA = rangB = 3.
Unerheblich  ist grundlegend. Es enthält die Koeffizienten für die Unbekannten x 2, x 3, x 4, was bedeutet, dass die Unbekannten x 2, x 3, x 4 abhängig sind und x 1, x 5 frei sind.
ist grundlegend. Es enthält die Koeffizienten für die Unbekannten x 2, x 3, x 4, was bedeutet, dass die Unbekannten x 2, x 3, x 4 abhängig sind und x 1, x 5 frei sind.
Wir transformieren die Matrix, so dass links nur der Basis-Minor übrig bleibt (was Punkt 4 des obigen Lösungsalgorithmus entspricht). 
Das System mit den Koeffizienten dieser Matrix ist äquivalent zum Originalsystem und hat die Form

Mit der Methode der Eliminierung von Unbekannten finden wir: ![]() , ,
, ,
Wir haben die Verhältnisse erhalten, die die abhängigen Variablen x 2, x 3, x 4 durch freie x 1 und x 5 ausdrücken, das heißt, wir haben eine allgemeine Lösung gefunden: 
Indem wir den freien Unbekannten beliebige Werte zuweisen, erhalten wir beliebig viele Einzellösungen. Lassen Sie uns zwei spezielle Lösungen finden:
1) sei x 1 = x 5 = 0, dann x 2 = 1, x 3 = -3, x 4 = 3;
2) setze x 1 = 1, x 5 = -1, dann x 2 = 4, x 3 = -7, x 4 = 7.
Somit haben wir zwei Lösungen gefunden: (0.1, -3.3.0) - eine Lösung, (1.4, -7.7, -1) - eine andere Lösung.
Beispiel 2... Untersuchen Sie die Kompatibilität, finden Sie eine allgemeine und eine spezielle Lösung für das System 
Lösung... Wir ordnen die erste und die zweite Gleichung so um, dass die erste Gleichung eins hat und schreiben die Matrix B. 
Wir erhalten Nullen in der vierten Spalte und arbeiten in der ersten Zeile: 
Jetzt erhalten wir die Nullen in der dritten Spalte mit der zweiten Zeile: 
 Die dritte und vierte Zeile sind proportional, sodass eine von ihnen durchgestrichen werden kann, ohne den Rang zu ändern:
Die dritte und vierte Zeile sind proportional, sodass eine von ihnen durchgestrichen werden kann, ohne den Rang zu ändern:
Wir multiplizieren die dritte Zeile mit (–2) und addieren zur vierten: 
Wir sehen, dass die Ränge der Hauptmatrizen und der erweiterten Matrizen gleich 4 sind und der Rang mit der Anzahl der Unbekannten übereinstimmt, daher hat das System eine eindeutige Lösung:
;
x 4 = 10 - 3x 1 - 3x 2 - 2x 3 = 11.
Beispiel 3... Überprüfen Sie das System auf Kompatibilität und finden Sie eine Lösung, falls vorhanden. 
Lösung... Wir stellen eine erweiterte Matrix des Systems zusammen. 
 Wir ordnen die ersten beiden Gleichungen so um, dass in der oberen linken Ecke 1 steht:
Wir ordnen die ersten beiden Gleichungen so um, dass in der oberen linken Ecke 1 steht:
Multiplizieren Sie die erste Zeile mit (-1) und fügen Sie sie zur dritten hinzu: 
Multiplizieren Sie die zweite Zeile mit (-2) und addieren Sie zur dritten: 
Das System ist inkonsistent, da wir in der Hauptmatrix eine Zeile mit Nullen haben, die beim Finden des Rangs durchgestrichen wird, und in der erweiterten Matrix bleibt die letzte Zeile, dh r B > r A.
Übung... Untersuchen Sie dieses Gleichungssystem auf Kompatibilität und lösen Sie es mit der Matrixrechnung.
Lösung
Beispiel... Beweisen Sie die Kompatibilität des linearen Gleichungssystems und lösen Sie es auf zwei Arten: 1) die Gauß-Methode; 2) Cramer-Methode. (Geben Sie die Antwort in das Formular ein: x1, x2, x3)
Lösung: doc: doc: xls
Antworten: 2,-1,3.
Beispiel... Gegeben ist ein lineares Gleichungssystem. Beweisen Sie die Kompatibilität. Finden Sie eine allgemeine Lösung für das System und eine bestimmte Lösung.
Lösung
Antworten: x 3 = – 1 + x 4 + x 5; x2 = 1 - x4; x 1 = 2 + x 4 - 3 x 5
Übung... Finden Sie allgemeine und spezifische Lösungen für jedes System.
Lösung. Untersuchen wir dieses System mit dem Satz von Kronecker-Capelli.
Schreiben wir die erweiterten und grundlegenden Matrizen auf:
| 1 | 1 | 14 | 0 | 2 | 0 |
| 3 | 4 | 2 | 3 | 0 | 1 |
| 2 | 3 | -3 | 3 | -2 | 1 |
| x 1 | x 2 | x 3 | x 4 | x 5 |
Hier ist Matrix A fett gedruckt.
Bringen wir die Matrix in eine Dreiecksform. Wir werden nur mit Zeilen arbeiten, da das Multiplizieren einer Zeile einer Matrix mit einer anderen Zahl als Null und das Addieren zu einer anderen Zeile für das System bedeutet, die Gleichung mit derselben Zahl zu multiplizieren und sie mit einer anderen Gleichung zu addieren, was die Lösung von . nicht ändert das System.
Multiplizieren Sie die erste Reihe mit (3). Multiplizieren Sie die 2. Reihe mit (-1). Fügen wir die 2. Zeile zur 1. hinzu:
| 0 | -1 | 40 | -3 | 6 | -1 |
| 3 | 4 | 2 | 3 | 0 | 1 |
| 2 | 3 | -3 | 3 | -2 | 1 |
Multiplizieren Sie die 2. Reihe mit (2). Multiplizieren Sie die 3. Reihe mit (-3). Fügen wir die 3. Zeile zur 2. hinzu:
| 0 | -1 | 40 | -3 | 6 | -1 |
| 0 | -1 | 13 | -3 | 6 | -1 |
| 2 | 3 | -3 | 3 | -2 | 1 |
Multiplizieren Sie die 2. Reihe mit (-1). Fügen wir die 2. Zeile zur 1. hinzu:
| 0 | 0 | 27 | 0 | 0 | 0 |
| 0 | -1 | 13 | -3 | 6 | -1 |
| 2 | 3 | -3 | 3 | -2 | 1 |
Das hervorgehobene Moll hat die höchste Ordnung (von den möglichen Molls) und ist ungleich Null (es ist gleich dem Produkt der Elemente auf der umgekehrten Diagonale), und dieses Moll gehört sowohl zur Hauptmatrix als auch zur erweiterten Matrix, daher rang ( A) = Rang (B) = 3. Da der Rang der Hauptmatrix gleich dem Rang der erweiterten ist, dann das system ist ein gelenk.
Dieses Nebenfach ist einfach. Es enthält die Koeffizienten für die Unbekannten x 1, x 2, x 3, dh die Unbekannten x 1, x 2, x 3 sind abhängig (Basis) und x 4, x 5 sind frei.
Wir transformieren die Matrix und lassen nur die Basis-Moll auf der linken Seite.
| 0 | 0 | 27 | 0 | 0 | 0 |
| 0 | -1 | 13 | -1 | 3 | -6 |
| 2 | 3 | -3 | 1 | -3 | 2 |
| x 1 | x 2 | x 3 | x 4 | x 5 |
27x 3 =
- x 2 + 13x 3 = - 1 + 3x 4 - 6x 5
2x 1 + 3x 2 - 3x 3 = 1 - 3x 4 + 2x 5
Mit der Methode der Eliminierung von Unbekannten finden wir:
Wir erhielten Beziehungen, die die abhängigen Variablen x 1, x 2, x 3 durch freie x 4, x 5 ausdrücken, d. h. wir fanden gemeinsame Entscheidung:
x 3 = 0
x 2 = 1 - 3x 4 + 6x 5
x 1 = - 1 + 3x 4 - 8x 5
nicht definiert schon seit hat mehr als eine Lösung.
Übung... Lösen Sie das Gleichungssystem.
Antworten: x 2 = 2 - 1,67x 3 + 0,67x 4
x 1 = 5 - 3,67 x 3 + 0,67 x 4
Indem wir den freien Unbekannten beliebige Werte zuweisen, erhalten wir beliebig viele Einzellösungen. Das System ist nicht definiert









